 |
|
|
||
| Category | Equipment | No. of Units |
| Length: | 1.8 m | N/A |
| Width: | 0.7 m | N/A |
| Height: | 1.2 m | N/A |
| Weight: | Yet to be measured | N/A |
| Structure: | Aluminum w/Stainless Steel Fixtures | N/A |
| Outer Shell: | Plastic/PVC Material | N/A |
| Flotation | Syntactic Foam | N/A |
| Ballast | Lead | N/A |
| Power Requirements: | Yet to be determined | N/A |
| Cables: | BIW Undersea Cables | 1 |
| Propulsion: | Electro-hydraulic Motors | 2 |
| Control: | Undetermined Telemetry System | 2 |
| Cameras: | CCD Camera (color) | 3 |
| Secondary Camera: | Infrared Camera | 1 |
| Sonar: | Scanning | 1 |
| Lights: | ROS UL-1000 (Underwater Lights) | 6 |
| Manipulators: | Magnum Manipulator System (from ISE) | 2 |
| Depth Gauge: | Strain Gauge | 1 |
| Compass: | Directional Gyro | 1 |
| Sample Holder: | Mesh Count 4, Gauge 14 Mesh Cage | 1 |
 Function
Function
This ROV will take samples of limestone and possibly live coral for study in the facility.
It will also function as a survey robot for studying the caves in the Blue Hole, reef areas, and
any other areas that researches deem interest-worthy.
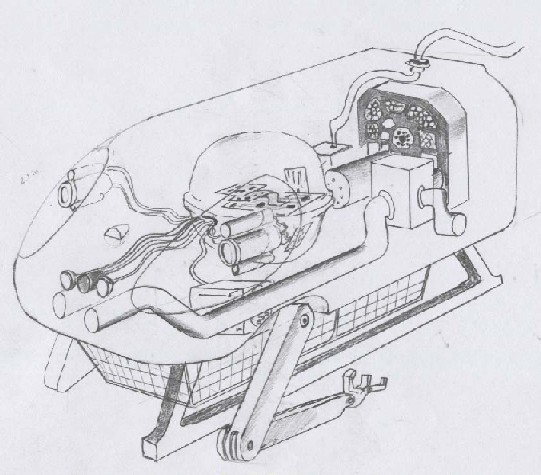
Main Body
We derived the dimensions of the Rock Sampler both from approximations of the size and placement
of equipment and comparison to existing vehicles of its class. The design was purposefully longer
than it was wide or tall to present a smaller cross-sectional area and thus streamline the design.
Aluminum is both strong and light and is especially useful for underwater applications in that it does not rust, therefore it was decided that the frame be constructed of aluminum with the possibility of stainless steel fixtures should any accessory require them. The sled portion of the remotely operated vehicle (ROV) is also made of aluminum and can be weighted down with lead weights if necessary.
To reduce the risk of water getting into the inner workings of the robot, we decided to seal off everything but the manipulator arms in a plastic case of roughly the same hardness and flexibility of polyvinyl chloride (PVC) with several sealed openings for the cameras, lights, and sonar equipment. The outer shell will also cover the syntactic foam layer on the top used for flotation, encasing the entire top 0.6m of the ROV.
Hanging from this encased portion is a detachable, and therefore easily replaceable, wire mesh cage where the robot deposits the samples it has collected. The cage will be divided into four slots to aid in sorting samples and will be of mesh count 4, gauge 14 coated galvanized steel wire mesh. There will also be an under-hanging lip to keep samples from falling out. Wire mesh was chosen to reduce drag on the overall vehicle. Its height was chosen to be large enough to hold samples, but to be 10cm above the sled feet bottoms so lead weights could be easily attached to the sled feet as ballast.
Control & Cables
The ROV, true to its name, will be manually operated through the tether by an operator located at a console
within the station itself, as opposed to a mother-ship console, to make use of the underwater location of the
station. The hardwiring in the ROV itself will include a microprocessor in the subsystem and utilize a system of
telemetry. The tether gives the operator real-time data, or at least very close to real-time, in order to avoid
obstacles and efficiently survey areas through the on-board cameras.
For extra security against damage by water, the cables connecting sealed chambers for circuitry and control mechanisms will be waterproof. Thermoplastic-covered steel wires were chosen over jute/tar-asphalt due to their low-moisture absorption properties and penetration resistance to sharp objects. While jute/tar-asphalt is also water-resistant, the easier installation of high density polyethylene (HDPE) jacket option of thermoplastic-covered wire was determined to be more useful. The coating also protects the cable armor against corrosion.
Propulsion
The Rock Sampler is anticipated to be over 400lbs, therefore electro-hydraulic motors were chosen over
universal/permanent magnet (PM) motors. Although brushless direct current (DC) motors are an option, because they
are relatively new in the field, we decided that the electro-hydraulic system would be more reliable. We also do
not need to limit the propulsion to DC options in the Rock Sampler as we do in the battery powered Water Sampler
due to the tether, which will supply power to the ROV directly from the station.
Navigation & Propulsion
Although the cameras help in navigating the ROV, we have included other features to help us determine the location
of our ROV relative to other objects as well. The first of these is scanning sonar, which we deemed more useful
for our purposes than continuous transmission frequency modulated (CTFM) sonar because of its higher resolution and
longer range. CTFM sonar's rapid update rates are useful, but in the event that we might wish to map the caves for
research or for the Belize tourist industry, resolution would be of more use. The real-time feedback from the cameras
through the tether would keep the robot from ramming into things between updates.
The Rock Sampler will also have on board a strain gauge for gauging depth. As the Blue Hole does not exceed 3000 feet, the larger, more expensive quartz depth gauge would be unnecessary. For a compass, we chose a directional gyro since flux gates are affected by iron and steel and gyros and flux gates are most commonly used in the ROV industry.
As it is difficult to use electromagnetic positioning systems underwater due to the damping of signals passing thorough the water, it is most likely that acoustic positioning systems will be utilized on the Rock Sampler. Acoustic positioning and communication will be discussed in greater length elsewhere in the Atlantis 1 Report.
Manipulators
We chose the Magnum Manipulation System from ISE as our manipulators due to the reliability of ISE and the Magnum design.
The manipulator is rugged and sturdy, as well as compact and low cost/cost-effective. The various customizing options
available with the Magnum are also attractive, as well as the multiple tool accessories available. For a more detailed
description of the Magnum Subsea Manipulator, visit ISE.
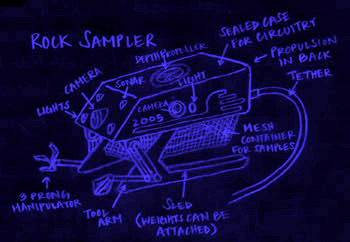
Cameras & Lighting
The main body, encased in the outer shell, will hold the collection equipment and controllers. There will be a
3-charged-coupled-device (CCD) camera mounted on the front and on either of the two sides. CCD cameras were chosen over studio cameras
because of their compact size, low cost, and ruggedness. Silicon intensified target (SIT) cameras were not considered
because they require low levels of light and the caves we might explore with the Rock Sampler are likely to have little to no
light in them and we felt CCD cameras and lights would give us the best performance. 3-CCD cameras have better color
reproduction than 1-CCD cameras, and color is important in the analysis of corals and other reef life forms.
The secondary single infrared camera, mounted in front, was requested by the researchers for the purpose of bringing us extra data in the surveying of the reef and possibly of the caves. The infrared camera will pick up infrared radiation given off by heat sources, allowing us to find areas of greater temperature in the Blue Hole.
For lighting, it was decided that ROS Inc.'s UL-1000 would be the most effective. These flood-lamps are small and come with reflector and light-weight impact resistant plastic, so they will not corrode. These quartz halogen lamps were made for underwater ROV use and have a long lamp life of about 2,000 hours, after which the bulb can be easily replaced. The UL-1000 is also well suited to photography as it produces color-balanced light, which is important for the surveying and analysis of the living reef.
Evolution
To the right is an earlier sketch of the Rock Sampler. This robot has been affectionately
named "The Turtle."