 |
|
|
 |
|
|
||
| Category | Equipment | No. of Units |
| Length: | 0.54 m | N/A |
| Width: | 0.21 m | N/A |
| Height: | 0.2 m | N/A |
| Weight: | Yet to be measured | N/A |
| Structure: | PVC Pipes | N/A |
| Flotation | Plastic Bobs and Syntactic Foam | N/A |
| Ballast | Lead | N/A |
| Power Requirements: | Yet to be determined | N/A |
| Propulsion: | Electric DC Motors | 3 |
| Control: | Undetermined Microprocessor | 1 |
| Sonar: | Forward Scanning | 1 |
Function
These AUV's will take water samples from around the blue hole and bring them back
to the station. They will also record the temperature and light intensity. This
data is used in environmental surveys of the blue hole.
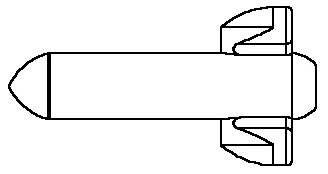
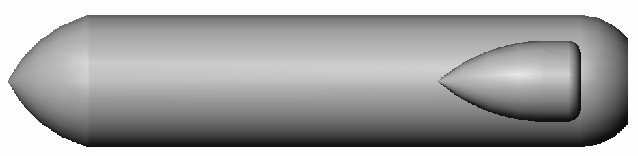
 Main Body
Main Body
The body consists of PVC pipe capped with a threaded male/female adapter. The
motors and propellers are mounted on the main body using smaller diameter PVC pipe
and clamps. The main body is waterproofed to protect electronics. However, the caps
on the end are removable to allow easy access to the inner electronics for repair and
maintenance. The size of the components, specifically the microprocessor, determined
the 10 cm diameter of the main body. The adjustable clamps will be used to mount the
motors and the ballast. The flexibility of the position of the clamps allows for
on-site adjustments. The smaller PVC brackets for the rear motors give the vehicle a
tighter turning radius because the motors are further out to the side.
Control
This robot is autonomous, meaning it will be controlled by an on-board microprocessor.
This was done because the problems involved in the tethering 80 separate robots at the
same time makes using umbilical cords impossible. The robot will be able to go to a
specific position and take the water sample, the temperature, and the light intensity
reading. It will then return to the station.
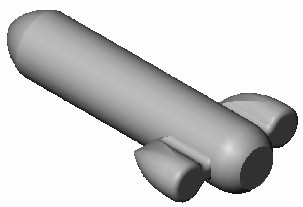
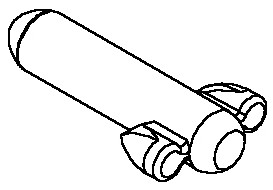
Propulsion
The water sampler will use 3 separate DC motors for propulsion. Two rear motors will
provide forward, backward, and turning capabilities; while a top-mounted motor will
provide the diving and rising propulsion. These will be controlled by the
microprocessor, and are waterproofed in film cans with toilet gasket and electrical
tape. The motors and propellers are small because of the low weight of the water
sampler.
Navigation
The water sampler will utilize an ultrasound tracking system in order to tell its
position in the blue hole. Knowing its position, it will navigate to the appropriate
area for taking the water sample.
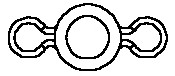
Manipulators
The water sampler needs to take three readings: the water sample, the temperature, and
the light intensity. The water sample will be collected by a syringe-like apparatus
that will be actuated by a servomotor in the sampler. The syringe will have two
stoppers connected by a thin rod 7 cm long. The outer stopper will therefore only need
to be moved 2 cm in order to take a large water sample. An external thermometer will
take the temperature. The ring of photo resistors located at the front of robot will
measure the light intensity.
Range & Power
The water sampler will have a range of 1500 m moving at a maximum velocity of 0.2m/s. It
is expected to have an average mission time of 125 minutes. It will be powered by the
microprocessor battery pack, which consists of 4 AA secondary batteries and 9 D
secondary batteries. This amount is sufficient enough to power the motors for the
duration of the mission.
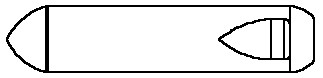
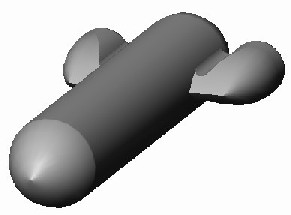
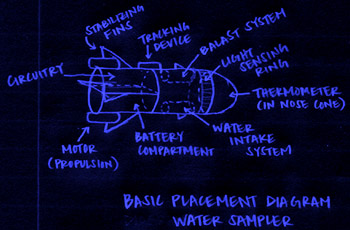
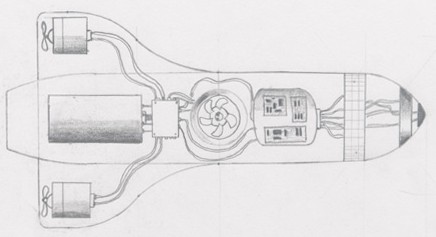
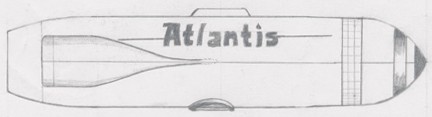
Evolution
To the right is an earlier sketch of the Water Sampler. Directly below is the more
aesthetic and fanciful (although perhaps not as practical) design for the water sampler
which spawned the 3-D drawings up top.
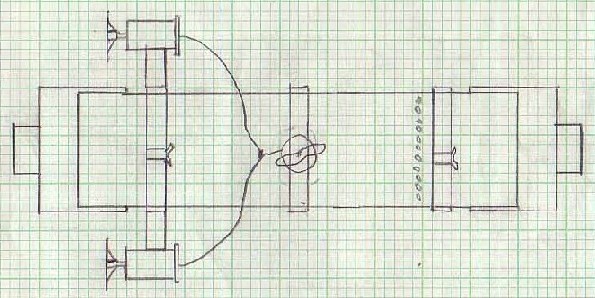
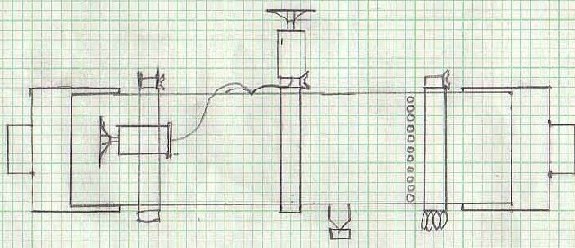
The images below on graph paper are the blueprints for the
watersampler prototype, due for completion and testing over IAP 2002. The prototype unit
is tentatively dubbed "The Minnow," although we hope it will escape the fate of the S.S.
Minnow of Gilligan's Island fame.
 |
 |
 |
 |
 |
 |