DRILLETE
Drillete will be equipted with the most extensive tool, a drill that will take core samples to a depth of 10 meters.
GENERAL TOOLS
Light Source
The underwater environment is very dark, as no sunlight can penetrate to such extreme dpeths. Therefore, in order to capture any images a powerful light source is needed, and a camera that is sensitive to small light amplitudes. Unfortunately, light produced by conventional lamps is easily absorbed by the surounding material, or backscattered, and consequently very little light reaches the subject. Green light is most penetrative at the depths we are dealing with.
The lights that Superman will use will be deep multi sea lights, available from Deep Sea Power and light.
For professional video imaging
applications, lamps such as
DeepSea Power and Light's HMI
lamps provide the excellent
illumination. DSPL's 400 W HMI
SeaArc2 (shown on the left) is an
arc discharge lamp in which the
luminous arc burns in a dense
vapor atmosphere comprising
mercury and the rare earth halides. Light produced by HMIs
has a higher color temperature (longer light
wavelengths), and thus penetrates further, providing
greater true-color illumination over a wide area.
HMIs are also more efficient than incandescent lamps
Manipulator ( Courtesy Roper Resources)
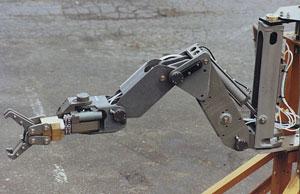
The rovs will require arms that have a large range of motion and increased mobility. The mobility of an arm is defined by a function number that states how many ways the arm is capable of moving. The motions in clude pitch, yaw, wrist rotate, swing of the entire arm, shoulder movement, and elbow movement. For tug, we need as small arm, with 5 functions. Magnum, a branch of ISE in Canada, produces such manipulators.
 Micro-sea cam(courtesy Deepsea Power and Light)
Micro-sea cam(courtesy Deepsea Power and Light)
The Micro-SeaCam 2000 is an ultra-small, high performance color video camera. The camera features
fixed focus, wide angle optics that provide a depth of field of 10 cm (4 in.) to infinity. The incredibly small
MSC-2000 measures just 2.5 cm (1.0 in.) diameter by 21.6 cm (8.5 in.) long. Unlike some other small
cameras, the entire camera is contained in one housing - there is no separate electronics bottle. What
makes this camera truly amazing is its 470 lines of horizontal resolution, minimum illumination of only 4.5
Lux, and optional Y/C output.
The depth rating will be increased to 5,000m.
 Suction Sampler:(Courtesy of HBOI Institute) This is an instrument that collects small organsims. Six bucket s are mounted on framework that will allow them to trun. A large diamter inlet hose is postioned at the centre of the ucker, wjile a variable spped, high volume suction pump is connected to the annular outlet regions at the top pf the bucket. A fine mesh screen prevents the specimens from being sucked into the pump. Sand exits from the rear of the rov.<
Suction Sampler:(Courtesy of HBOI Institute) This is an instrument that collects small organsims. Six bucket s are mounted on framework that will allow them to trun. A large diamter inlet hose is postioned at the centre of the ucker, wjile a variable spped, high volume suction pump is connected to the annular outlet regions at the top pf the bucket. A fine mesh screen prevents the specimens from being sucked into the pump. Sand exits from the rear of the rov.<
Sipper
The task of capturing images of microscopic marine particles such as
zooplankton or suspended sediment has relied for years on using
oceanographic imaging systems with analog video or film recording methods.
While generally adequate, video resolution is limited by the
two-dimensional detector array used. High-resolution images are attainable,
but are typically produced with a reduced imaging area.
Shadowed Image Particle Profiling
and Evaluation Recorder (SIPPER), uses two high-speed line scan
cameras and two collimated laser generated light sheets to image suspended
particles in sampled water. Transient particle shadow images are
captured in two dimensions to permit maximum characterization.
This novel imaging system makes these cameras ideal for use in mobile
oceanographic imaging applications that require high-resolution outputs.
The digital data imaging system provides a continuous record of all
particles passing though the sampling tube, and stores views from two
orthogonal axes. Lower resolution images are displayed in real-time to allow
the user to optimize imaging parameters.
High-resolution images are stored digitally, thereby reducing the processing
time required before computer analysis. A different digital line-scan
camera is used for each axis to allow optimization of the resolution at
different water velocities.
The SIPPER system has been successfully deployed on towed and autonomous
underwater vehicle platforms.
BUOYS - see website field of flowers sensor array
-we found a site describing system of nodes on bottom measuring data that you can view. Similar to our concept of buoys.
-equipted with sensors
<
c
