The complete assembly is designed around user experience, cost, and operations management. Our design places strict priority on immersing players in a story and the overall design such that various components, such as the operation of the crane and hook, can easily vary in complexity in their final design depending on total capital investment budget.
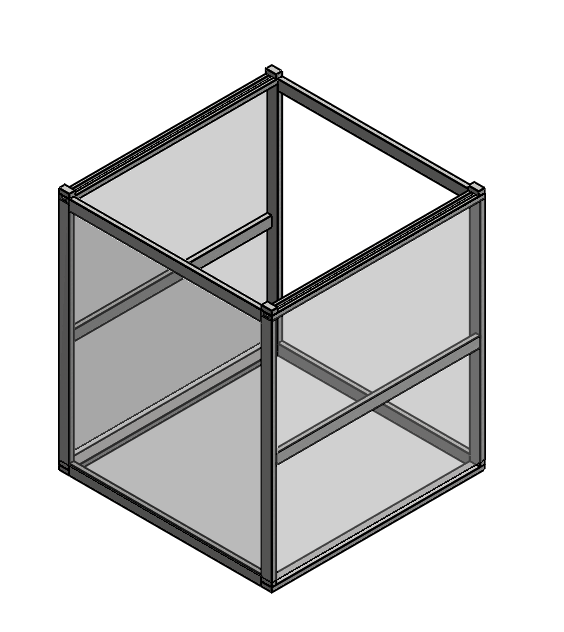
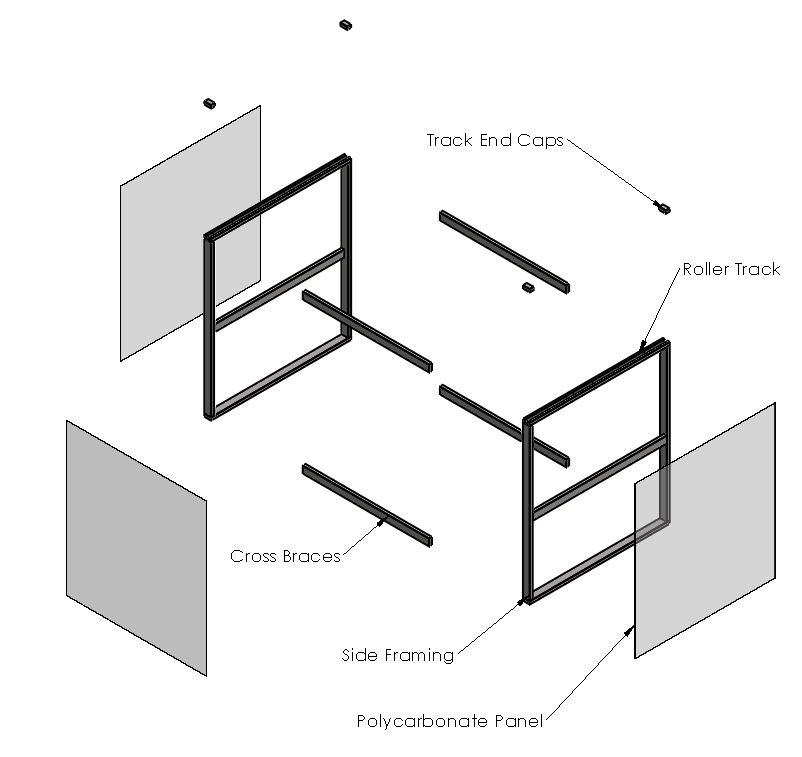
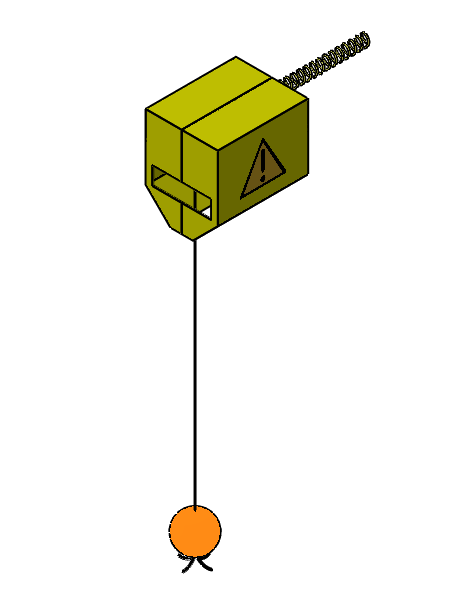
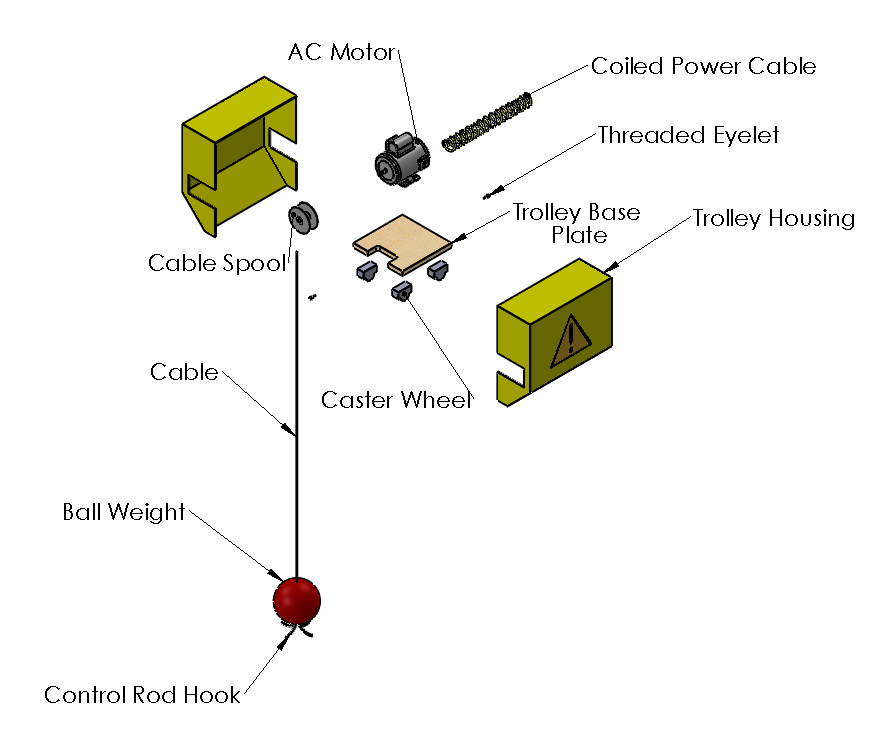
In the example images, the system has been set up to be operated by three players. The nuclear core is enclosed in a glass room which serves the dual purpose of providing a sense of risk in the situation, that the system was designed to prevent nuclear operators from radiation exposure, while also ensuring the rods do not role out of the room and get lost. Mechanical cranks on either side of the glass room control the movement of the trolley across the X- and Y-axes, and a lever electronically controls the raising and lowering of the crane in the Z-axis, with the cable operated by an electronic pulley contained within the trolley.
The system has been designed to be workable by as few as 2 or as many as seven players. For a two player game, the glass walls will be fully transparent, and one person can operate one control while the other person controls for both one of the X- or Y-axis as well as reaching around to control the Z-axis movement as well. We propose that a final design would include either curtains that can raise or lower to blind the operators or electrochromic glass, so that additional teammates would be required to peek through holes in the walls to give verbal guidance to the control operators on what actions to perform.
Our sketch model placed maximum emphasis on operability and cost. Our intent was to provide a working model with a minimum of non-player inputs required, leading us to opt for a purely mechanical design, with X-, Y-, and Z-axis movement of the crane and hook all guided by cables. Because we had a fully functioning system, we were able to observe test subjects interacting with the game play to achieve the mission of operating the crane to return the control rods to the nuclear core.
This mechanically driven baseline model was well received by test subjects. We found that there was complexity in the operation of the Z-axis due to the variable length of rope required to maintain the same Z position as the players moved the trolley across the X-Y plane. We did conclude, however, that the ball-and-hook setup was a challenging and fun device, offering an additional challenge over a claw or vacuum method while adding a sense of realism to the idea that certain mechanisms have been damaged and reduced in capacity by the control rod crisis. We also found that quality control will be critical to ensure that players can operate the trolley smoothly, as the sketch model trolley would occasionally get stuck.
Our overall system we believe to minimize construction complexity while maximizing user experience, critical for both affordability and durability. Because much of the system is mechanically guided, operations and maintenance will be minimal and also low cost due to the simple skillset required to perform the majority of system repairs. Visual and sound effects can be added with lights and speakers piping in sensory overload with risking any damage by players.