Simulations of EVA Tasks
Intelsat VI Capture
During the Space Shuttle mission STS-49 in May 1992, astronauts performed an EVA to
capture the Intelsat VI satellite,stranded in an orbit that was too low. The original plan called for
one astronaut to clamp a specially designed capture bar on to the structural interface ring in
the base of the cylindrical satellite. Click here for a picture taken
during the EVA.
In several attempts during two separate EVA sorties, the astronaut was unable to capture
the satellite using the rehearsed procedure with the capture bar. Latches in the capture
mechanism failed to fire before the slowly rotating satellite (about 1 rpm (revolution per
minute)) started nutating and translated beyond reach.
To investigate the usefulness of a 6-dof computer simulation, the Intelsat VI satellite was
modeled as a rigid body with six degrees of freedom in space, and the crew member as two
three-segment arms (upper arm, forearm, and hand) holding a capture bar. Simulations were performed for a
number of contact scenarios, inlvolving different contact forces, torques, and times of
contact. It was observed that the most significant perturbation of the motion of the satellite
occurred after an unbalanced two-sided contact with a counter-rotation torque (from friction
or mechanical interference). The resultant force acting parallel to the spin axis was about 85
N. The counter-roll (Y-axis) moment was -189 N-m and the yaw moment was 26 N-m.
Large nutation angles are observed due to the loss of spin stabilization incurred by the
reduction in spin rate resulting from the counter-rotary moment.The resulting motion of the
satellite was seen in retrospect to correspond very closely with the motion observed in
video footage of the actual EVA. It is believed that this difficulty did not surface during
training because the small force levels that proved critical in space were masked by friction
in the air bearing floor simulator.
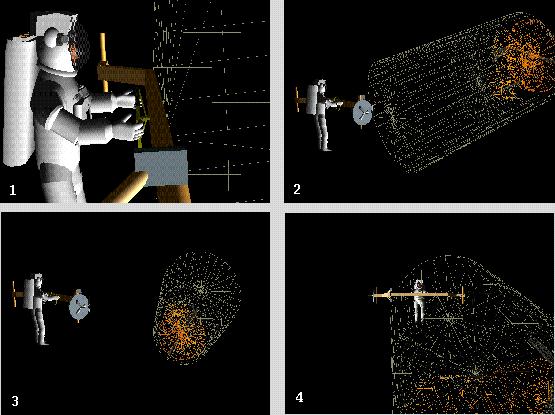
Sequential views of the capture bar contacting Intelsat VI.
Spartan Payload Handling
EVA tasks involving manipulation of the Spartan 204 free flying astronomy payload, as
performed during Space Shuttle mission STS-63 (February 1995), served as the subject for
two dynamic simulations. An EVA crewmember was modeled as a seven segment system
with an eighth segment representing the massive payload attached to the hand. For both
simulations, the initial configuration of the lower body (trunk, upper leg, and lower leg)
was a neutral microgravity posture. In the first simulation, the payload was manipulated
around a circular trajectory of 0.15 m radius in 10 seconds. It was found that the wrist joint
theoretically exceeded its ulnal deviation limit by as much as 49.8ž and was required to
exert torques as high as 26 N-m to accomplish the task, well in excess of the wrist
physiological limit of 12 N-m. The largest torque in the first simulation, 52 N-m, occurred
in the ankle joint. To avoid these problems, the second simulation placed the arm in a more
comfortable initial position and the radius and speed of the circular trajectory were reduced
by half. As a result, the joint angles and torques were reduced to values well within their
physiological limits. In particular, the maximum wrist torque for the second simulation was
only 3 N-m and the maximum ankle torque was only 6 N-m.
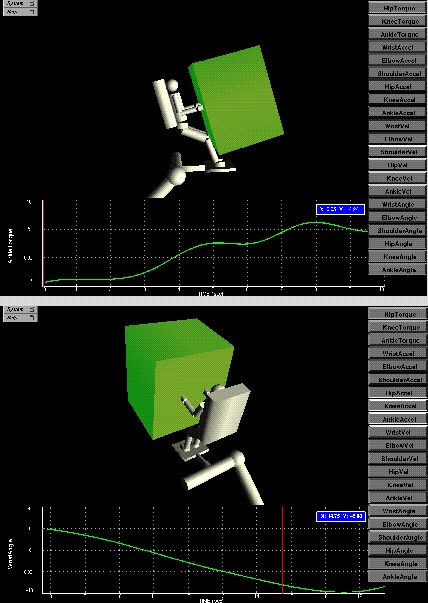
Two EVADS views of Spartan payload manipulation.
Back to the EVA home page.