You have been learning about human factors in cockpit display systems. In this lab we ask you to design a operation environment for the space shuttle crew to manipulate the robotic arm on the space shuttle.
Your company, HFE Engineering Consulting Inc. was asked by NASA to come up with a concept for the next generation human interface for the robotic arm on the space shuttle. NASA's sets of requirements are fuzzy. They want "versatile", "user-friendly", and "reliable" interface. Your team must identify the requirements and constraints, decide what functions are needed to satisfy the requirements, translate the functions into design elements, and integrate the element into one system with human factors taken into consideration.
NASA's space shuttles are equipped with robotic arms that are manufactured by Canada's MD Robotics. The Shuttle Remote Manipulator System (SRMS), known as "Canadarm", has been used to place satellites into their proper orbits and retrieving malfunctioning ones for repair. In the service mission for the Hubble Space Telescope, Canadarm was also was used as a mobile work platform for astronauts during numerous space walks required to repair the faulty telescope. Canadarm is now playing a pivotal role in the assembly of the International Space Station. Unplanned exercises for Canadarm have included knocking a block of ice from a clogged waste-water vent that might have endangered the shuttle upon re-entry, pushing a faulty antenna into place, and successfully activating a satellite that failed to go into proper orbit.
Your conceptual design may include:
This is an open-ended problem, and your team is working on the top-level conceptual design. So, Limit yourself to the relevant level of detail for this phase. Specifying diameter of a screw is not of interest here.
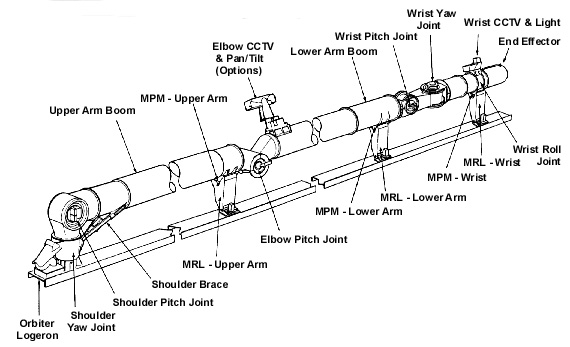
The Shuttle Remote Manipulator System consists of a shoulder, elbow and wrist joint separated by an upper and lower arm boom. The shoulder joint has two degrees of freedom, the elbow joint has one degree of freedom, and the wrist joint has up to three degrees of freedom.
Technical Details
Length 15.2m (50ft.)
Diameter 38cm (15 in.)
Weight on Earth 410Kg (905 lbs.)
Speed of Movement - unloaded 60 cm/sec. (2 ft./sec.)
- loaded 6 cm/sec. (2.4 in./sec.)
Upper & Lower Arm Boom Carbon Composite Material
Wrist Joint Three degrees of movement
(pitch +/- 120o, yaw +/- 120o, roll +/- 447o)
Elbow Joint One degree of movement
(pitch +2o to - 160o)
Shoulder Joint Two degrees of movement
(pitch +145o to -2, yaw +/- 180o)
Translational Hand Controller Right, up, down forward, and backward movement
of the arm
Rotational Hand Controller Controls the pitch, roll, and yaw of the arm
More information is available from MD Robotics web page.
http://www.mdrobotics.ca/canadarm.htm
You have to deliver your design to NASA. Visualize your team's concept with CAD model and illustrations. Again, try to stay in the relevant level of detail and not overdo the problem.
There are two CAD packages available on the Athena environment,
AutoCAD and Pro-Engineer. The instructions on how to run these are
located at:
http://web.mit.edu/acs/www/whererunsa.html#autocad
http://web.mit.edu/acs/www/whererunsa.html#Pro-Engineer
Make sure your design takes care of human factors involved, and discuss how they are taken care of in the report.
We are trying to get a software package that enables you to verify your design in terms of anthropometrics. I will provide information on this as soon as possible on the class web site.
The following are to be turned on the due date:
October 2: Lab Assignment handed out
October 23: Deliverables due