Robotic Four-Claw Gripper for 2.12 Class
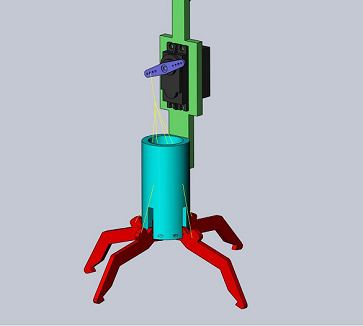
Prototype and solid model of the four-claw gripper. I worked in a team of five to design, build, and control a robotic gripping end effector for the 2.12 Introduction to Robotics class. Our task was modeled off of cleaning up nuclear debris using a robot. We needed to control an end effector to sweep across pool containing debris (ie magnetized glow-sticks in our case), pick up all the debris, and deposit the debris in a container. My task was to design the end effector. I based this design on an olive picker. Four claws were extended by springs, and closed when a kevlar thread connected to all of them was pulled up into the pipe section via a servo. The end effector had reed switches to detect the magnetized glow sticks, and we also developed a controller so that the gripper could autonomously search the pool, pick up and deposit the glow sticks.
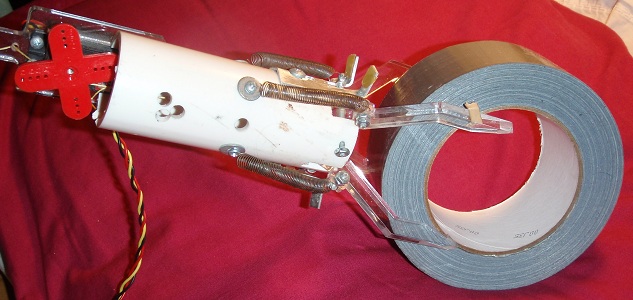
Gripper picking up a roll of duct tape.
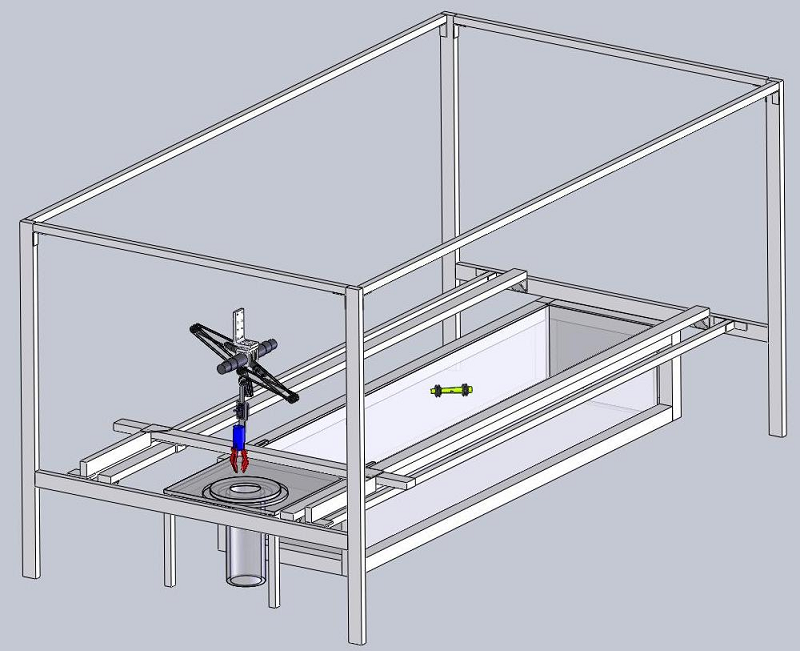
Solid model of the gripper and pool.
|