
BACK
TO PORTFOLIO
|
Rocky 7 was the robot testbed I worked on
for my undergraduate thesis at the Artificial Intelligence Laboratory at MIT.
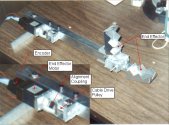
I designed and built a two-fingered cable drive end-effector for use in the
developement of visual recognition algorithms.
Cable drive transmissions are low inertia, low backlash, and move the bulk of the mechanism weight (motor, encoder, etc) away from the end of the arm. This reduces the inertia of the arm and the amount of torque required for arm motion.
|