



BACK
TO PORTFOLIO
|
This project began as an experiment for "Legged Locomotion In Robots and Animals", a
seminar given by the MIT Leg
Laboratory.
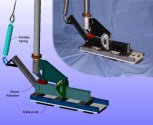
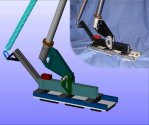
The purpose of the experiment was to verify the predictions of the inverted pendulum model of bipedal motion; specifically, the change in walking speed given a change in leg weight, length, and inline stiffness. Compliant leg extensions (stilts) were built to simulate a larger, anatomically consistent bipedal leg design. The leg parameters for these stilts would be used for comparison with my natural leg parameters in the walking model. Given the change in leg characteristics between normal walking and walking with stilts, the inverted pendulum model predicted a ~25% increase in gait speed, which was closely matched experimentally. In the years following this class, I have made several revisions of the design using different materials and machining methods. The latest version is shown below. |