

BACK
TO PORTFOLIO
|
During my undergraduate thesis work at the Artificial Intelligence Lab, I
redesigned a section of the end-effector for one of the lab's research robots. The end-effector of the W.A.M. robot
(Whole Arm Manipulator) was referred to as the "Talon" due to the shape and actuation of its fingers.
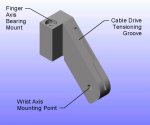
The Talon had undergone several design iterations, and was comprised of many layers of adapted parts. I designed a simple replacement part which had all the functionality of the parts it was replacing. Below are images of the finished part alone and installed on the Talon. |