The Challenge: To design a self-powered car that would travel down a track, drop a hackey-sack in a hole at the center of the track, and return to its home position in exactly 15 seconds. Competed against other contestants’ cars starting simultaneously from the opposite end of the track.
Technical Approach: Used computer control to time the car’s approach to the hole, the launching of the hackey-sack, and the return. This was necessary to meet the timing goal.
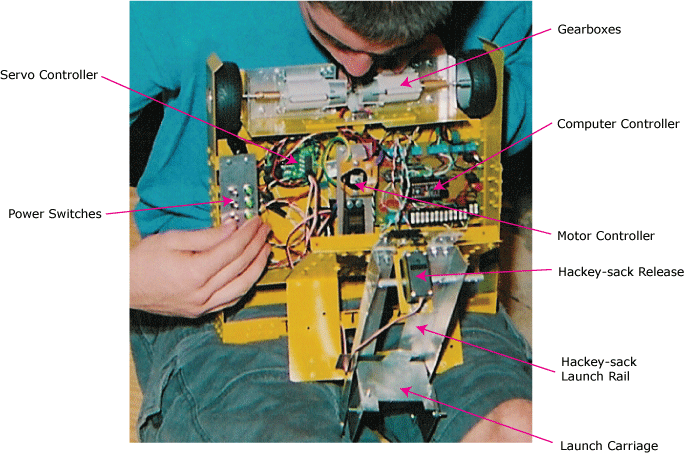
Selected Design Features: The vehicle had a micro-controller that I programmed to govern motor speed, direction, and release of the hackey-sack. This was accomplished by sending a numerical value for the motor speed to a servo controller, which converted the digital signal into a pulse that caused the mechanical speed control to move. This regulated the amount of current that flowed through a left and right motor, which in turn spun a gearbox and provided power to the wheels. Except for the gearboxes, microchip, and servo controller, my partner and I designed and machined all components and circuit boards.