2.007 Is the best class at MIT, at least that I have taken. In the class students design and build a robot in order to accomplish a specific task. As in my bobtail experience, I decided to build a stationary robot in order to accomplish the precision and speed necessary to do well in the contest. The robot included a lasso in order to grab a lever that needed to be pulled. In order to actuate this string effectively I designed a continuously variable automatic transmission in order to pull in slack fast when there was no tension, but then to provide high torque when the tension was strong. The robot, after almost losing the first round because I forgot to attach a key gear, made it to semi-finals, and lost to the eventual winner in an exciting game. The game was a tug-of war until the string that I used to hold the lever broke from the tension of my opponent also holding the lever.
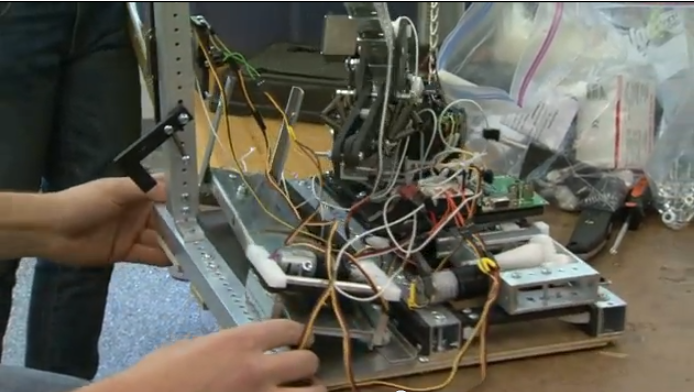
This is a view of the continuously variable automatic transmission. This device used the tension on the string to change the strings position on a cone-winding element. As the tension increased it straightened out the wire, which also caused it to move down to the small end of the cone. As soon as the tension decreased, a spring moved it back up to the large end of the cone.