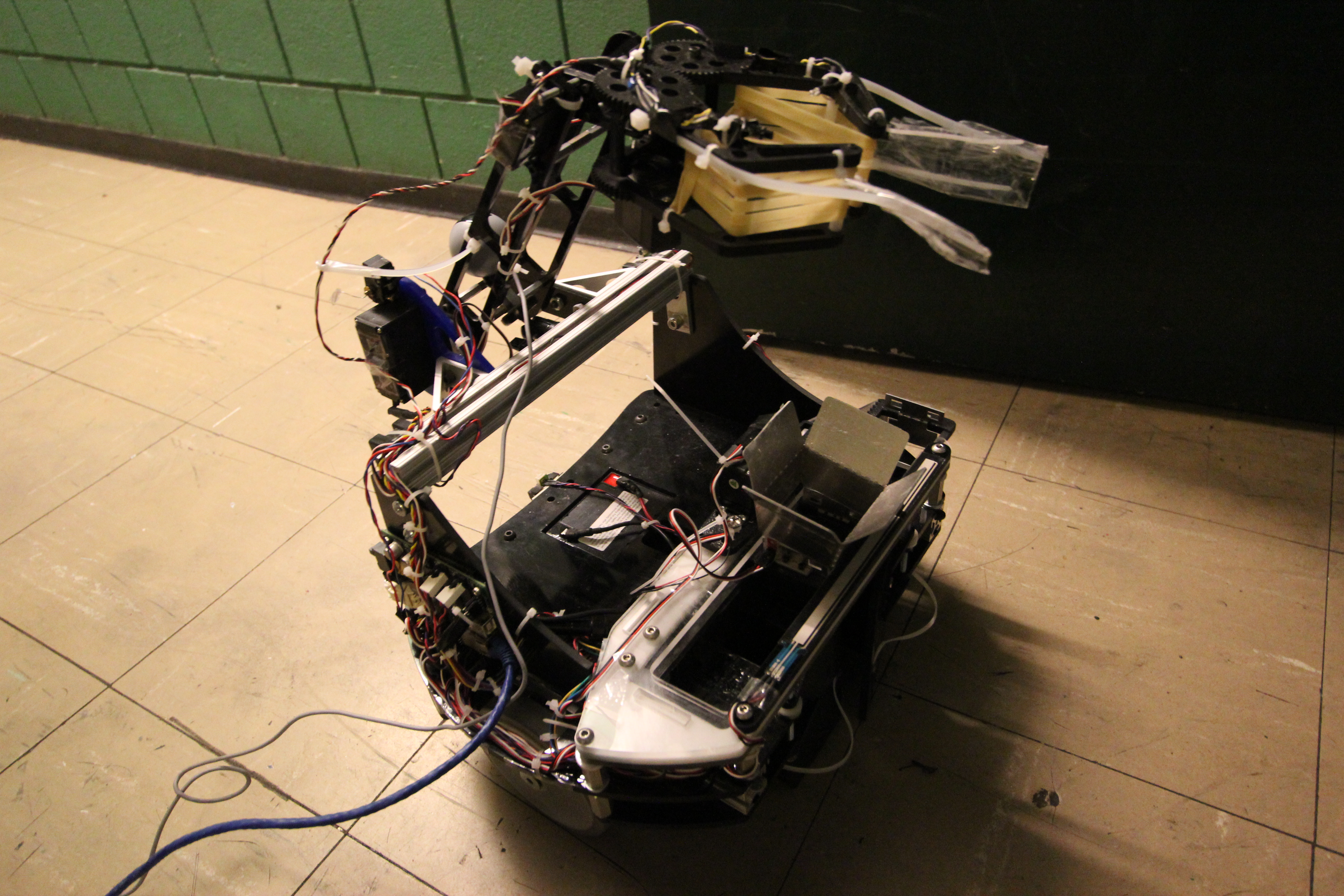
This is the robot that I built for my 6.141 group. The goal of this class is to design and program a robot that is able to find 2 inch plastic cubes scattered around the floor and assemble them into some structure. We decided to try to make an arch. This is accomplished by having basically a mold of the shape of an arch. As the robot collects blocks it drops them into the slider, which then chooses where to put the block. when the last block is collected, it forms the top of the arch, and the robot simply opens its gates and drives forward. Watch the video at the bottom of the page in order to see it in action! However the video is long and slow, so you might want to skip to near the end when it successfully makes the arch.
This shows the the robot, the motors, wheels, and claw were provided for us as part of the class.
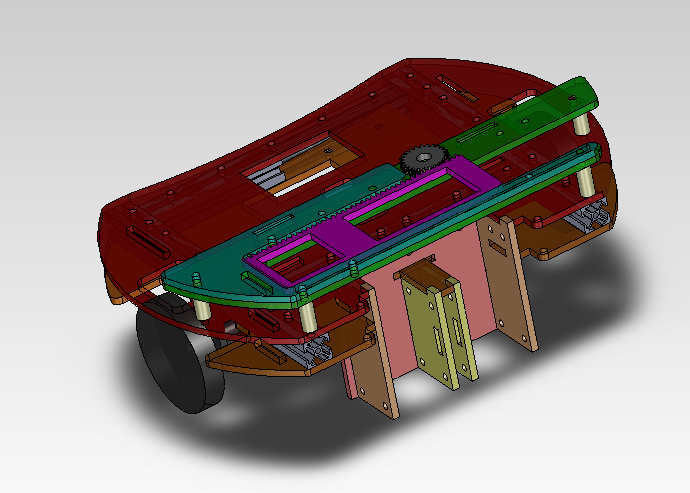
This shows the cad-model of the pieces that made up the body of the robot. All of these pieces were designed to press-fit together or to bolt to 80-20 aluminum extrusion.
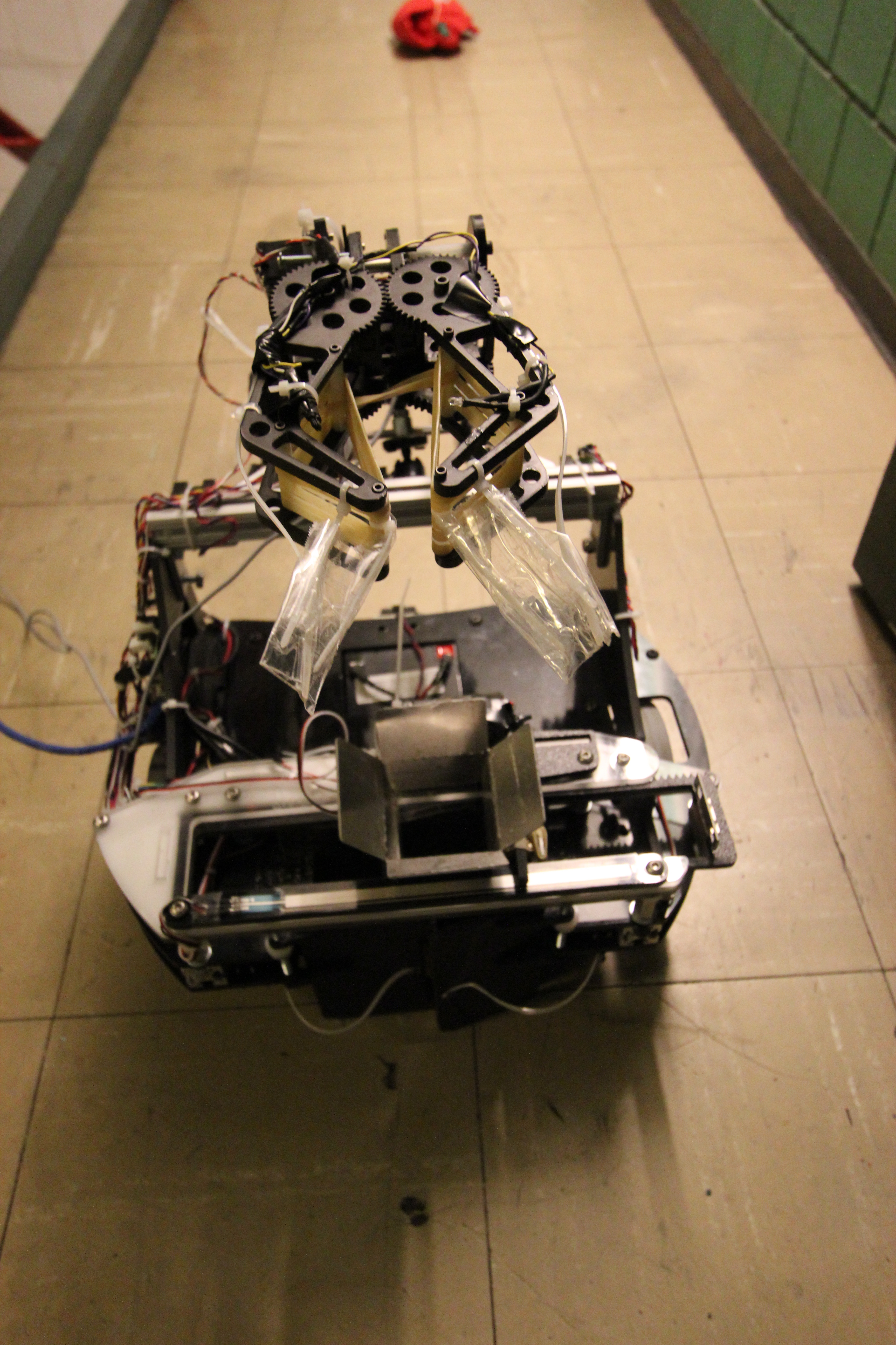
One more view of the robot, attempting to show the slider mechanism. This is simply a servo with a gear attached that turns a rack attached to a piece constrained to move in one linear degree of freedom by plastic sliding bearings.