Feedback Control Systems Seminar
Systems that employ feedback control are all around you: stereo amplifiers, CD players, electric vehicles, radar antennas, and high performance airplanes, to name a few. The creation of successful feedback-controlled systems almost always requires more than the application of a set of analytical techniques. Good feedback system design requires the connection and application of theory to problems of practical interest, as well as a rich understanding of how to make trade-offs amongst all the parts of a system.This course focuses on the design of feedback systems, using the intuitive analysis tools of classical control theory. The course content includes time-domain, frequency-domain, and s-plane concepts that provide insight into the behavior of linear and nonlinear systems. Applications to mechanical and electronics systems, including servomechanism design, vibration isolation, operational amplifier compensation, power conversion, waveform generators, and phase lock loops are explored.
Course Contents
- Introduction to Feedback Systems:
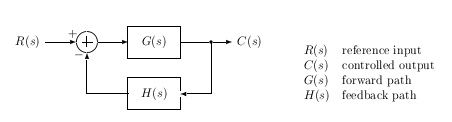
History of regeneration, feedback, and automatic control. Drawing block diagrams, standard terminology, and system structure. Desensitivity. Review of Laplace transforms and Bode plots.
- Modeling and Responses:
Modeling and linearization of systems. Relationships between time and frequency response. Steady-state errors. DC motors and servomechanisms.
- Stability:
Review of complex analysis. Introduction to stability. Maxwell, Routh, and Nyquist. Evans' root-locus method.
- Root Locus Method:
The characteristic equation. The root-locus rules. Root-locus examples. The inverted pendulum system.
- Nyquist Criterion:
Conformal mapping and Cauchy's Residue Theorem. The Nyquist Criterion. Examples of the Nyquist Criterion. Degree of stability and gain setting.
- Frequency Domain Analysis:
The Hall Chart. The Nichols chart. Relations between magnitude and phase: Bode diagrams. Gain margin and phase margin. Closed-loop performance specifications. The Bode Obstacle Course.
- Compensation:
Motivation and goals. Voltage regulators and op-amp gain-bandwidth product. Gain setting and dominant pole compensation. Lead and lag compensation.
- Series Compensation Examples:
Series compensation implementation with passive and active circuits. Compensation design example. Creative uses for decompensated op amps.
- Minor-Loop Compensation:
Compensation in servomechanisms. Op-amp compensation: 741 versus 101. Transimpedance amplifiers.
- Minor-Loop Examples:
Two-pole minor-loop compensation and tracking error. Op-amp compensation for capacitive loads. Right half-plane zero in op amps. Nested Miller compensation. History of the monolithic operational amplifier.
- Frequently Encountered Transfer Functions:
Dealing with right half-plane zeros, lightly damped quadratics, and time delays.
- Nonlinear Systems:
Describing functions. Saturating nonlinearities. Oscillators and describing function analysis. Conditional stability. Nonlinear compensation.
- Phase Lock Loops I:
Applications. Basic PLL design. Phase detectors.
- Phase Lock Loops II:
Clock/data recovery. Acquisition.
- Power Conversion:
Applications. Analysis of buck and boost topologies. PWM control. Current-mode control. Implementation details.
Schedule
Weekly four-hour lectures, usually 1pm-5pm with breaks and problem sessions. Weekly practice problems.
Instructor
Kent H. Lundberg attended the Massachusetts Institute of Technology, earning a Ph.D in Electrical Engineering in 2002. He is currently a Lecturer with the Department of Electrical Engineering and Computer Science. His research and teaching interests include the application of classical control theory to problems in analog circuit design. He consults for several industry corporations and organizations.Dr. Lundberg has been involved in teaching MIT courses in circuit design and feedback systems as recitation instructor and lecturer for ten years. He is Associate Editor for History of IEEE Control Systems Magazine, and he collects old textbooks on radar, nuclear energy, and control.