Design and Testing of a High Accuracy Robotic Single-cell Manipulator
INTRODUCTION
We have designed, built and tested a high accuracy robotic single-cell manipulator to be able to pick individual cells from array of microwells, 50 μm each. Design efforts have been made for higher accuracy, higher throughput, and compactness. This proposed system will be used to help select and isolate an individual hybridoma from polyclonal mixture of cells producing various types of antibodies. It is important to be able to do this cell-retrieval task since a single isolated hybridoma cell produces monoclonal antibody that only recognizes specific antigens, and this monoclonal antibody can be used to develop cures and treatments for many diseases.
DESIGN OF SINGLE-CELL MANIPULATOR
The proposed system is designed to have a T-bar mechanism with two linear stages for XY plane positioning to have higher stiffness and less structurally-inherent error. Figure 1 shows the schematic design of the proposed system, robotic single-cell manipulator.

Figure 1
Precision is especially required in Z-axis movement for successful cell-retrieval procedure. Having independent structure for the Z-axis motion on the XY positioning mechanism which provides large stiffness, the proposed cell-picker is designed to minimize error. Among many options considered for Z-axis motion, a rotational mechanism with a voice coil actuator is selected because this results in relatively smaller reaction on the system and has advantages of direct drive.
PROTOTYPE OF THE PROPOSED SYSTEM
An old hard disk drive system is utilized to obtain Z-axis motion since it has a well-constructed electromagnetic motor and also well-built-in bearing. Arm extension, shown in Figure 2, has also been designed, constructed, and assembled to meet the design requirements of the system. Since the voice coil motor has a relatively small torque constant of 0.4 Nm/A, it is important to counter-balance the arm.
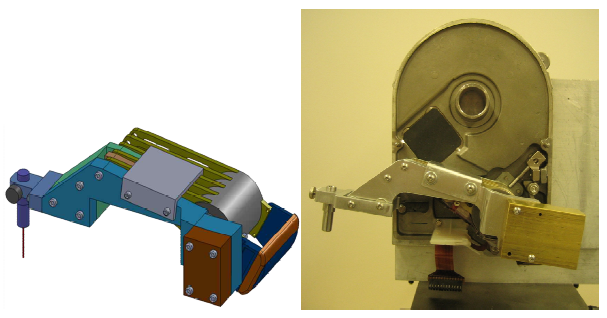
Figure 2
The prototype, illustrated below in Figure 3, integrates the Z-axis and XY stage motion, real-time microscopy imaging, and cell manipulation with a NI PXI-controller centered as a main real-time controller.
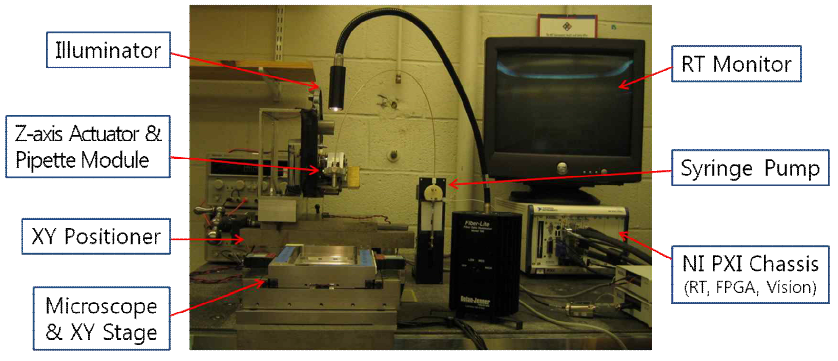
Figure 3
An inverse microscope is also self-designed and constructed assembling a charge-coupled device (CCD) camera and a zoom lens specified enough to observe a 10 μm cell or microbead, and a microscope stage with the resolution of submicron. In addition, a syringe pump, together with a glass pipette, is used to aspirate and dispose individual cells out of Polydimethylsiloxane (PDMS) microwells and into 96 well plates with the control of appropriate liquid amount and speed.
RESULTS AND CONCLUSIONS
This prototype is built to test performances of the proposed system in terms of single-cell retrieval. This cell-retrieval is experimentally tested with the equivalent size, 10 μm, of
microbeads. Figure 4 below shows one block of PDMS microwells containing a number of 10 μm microbeads; the left figure is before the cell-retrieval and the right one is after.
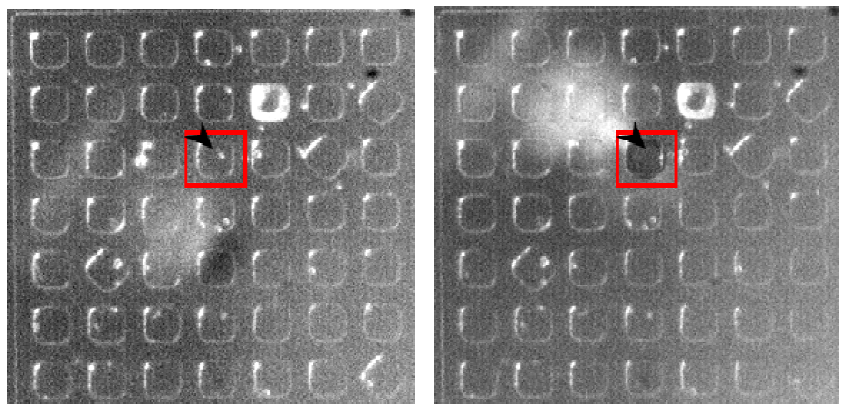
Figure 4
The small white dot pointed with a block arrow indicates the picked microbead. The retrieval process itself takes average of 5 to 10 seconds depending on how long microbeads have stayed in microwells. The testing of the prototype results in reliable cell-retrieval with the success rate of more than 90 percent. More experiments with actual living mammalian cells will be conducted as a future work.