Noncontact Processing
of Fibers, Beams, Webs, and Plates
Acknowledgments
This project is funded by National Science Foundation
under Grant award number DMI-9700973.
Motivation
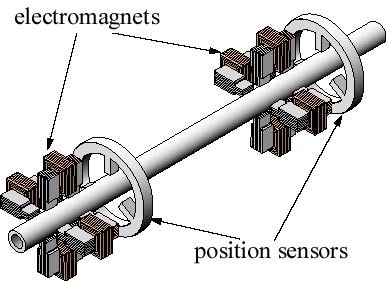
This project arose from a consultation involving
a metal broom handle manufacturing plant. The handle makers calculated
that they could save a significant amount of money if they made the process
continuous. Beginning with a flat piece of steel which is rolled
and seam welded into a tube, the soon-to-be broom handle is moved
through the painting, heating and curing stations at about 1 meter per
second. While this happens, the tube cannot be touched by rollers
without marring the surface finish, so it is magnetically levitated with
ten magnetic suspension stations for the 35 meters it takes for the paint
to be applied and to harden.
 Abstract
Publications
Abstract
Publications
M. C. Weng, X. Lu and D. L. Trumper, "Vibration
Control of Flexible Structures Using Sensor Averaging and Acutator Averaging
Methods," IEEE Transaction on Control System Technology, to be accepted.
X. Lu, M. C. Weng and D. L. Trumper, "Robust
Moment Control of Flexible Structures Using Sensor Averaging and Acutator
Averaging," IEEE Transaction on Control System Technology, to be accepted.
Last updated on Mar. 10,
2001