Controller Design
Slow Roll-Up Lead Compensator
The controller we are using is a Single-Input-Single-Output controller.
To add damping to vibration modes of the structures, we use lead compensation.
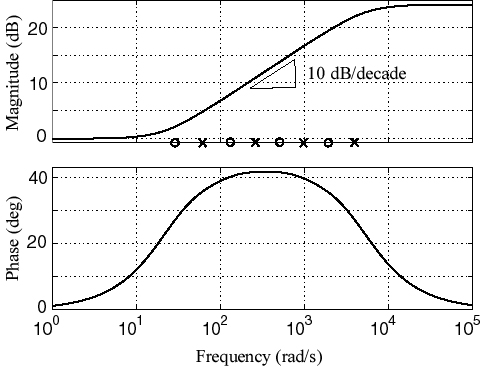
To avoid over-amplifying higher frequency modes, we adjust the locations of
multiple zero-pole pairs, and have a 10 dB/decade gain slope and 30 degree
phase all over the vibration modes that we are controlling. The Bode Plots are
shown in the following.