Magnetic Suspension Experiment I: 2 foot long beam
Hinged-Free Ends Suspension
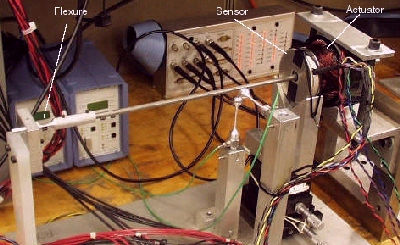
The first magnetic suspension experiment uses 1 sensor and 1 actuator to
suspend a tube on one end, while the other end of the tube is simply supported.
The suspension control is implemented by using a lead compensator on X axis, and
another lead compensator on Y axis; X and Y direction dynamics are assumed
uncoupled and are controlled independently. The closed loop bandwidth is
below the first vibration frequency.
Free-free Ends Suspension
The second magnetic suspension experiment uses 2 sensors and 2 actuators
to suspend a tube one both ends, the tube is only supported by the magnetic force;
it floats in the air without any contact. The suspension control is implemented
by local control; each sensor/actuator pair is controlled independently. X and
Y direction dynamics are controlled independently. The closed loop bandwidth is
below the first vibration frequency.
