High-Precision Planar Magnetic Levitation
These pictures show our linear-motor-levitated stage for
positioning wafers for photolithography. This stage was developed by Dr.
Won-jong Kim in his Doctoral thesis under the supervision of Prof. David
L. Trumper of the MIT Department of Mechanical Engineering. The stage uses
the novel levitation linear motors developed in Dr. Kim's thesis to both
suspend and position a 5 kg platen in three translational (x,y,z) and three
rotational (theta-x, theta-y, theta-z) degrees of freedom, with nanometer
resolution. Such stages will be of increasing utility in advanced
semiconductor production systems such as wafer steppers which require
nanonmeter-resolution positioning in six degrees of freedom.
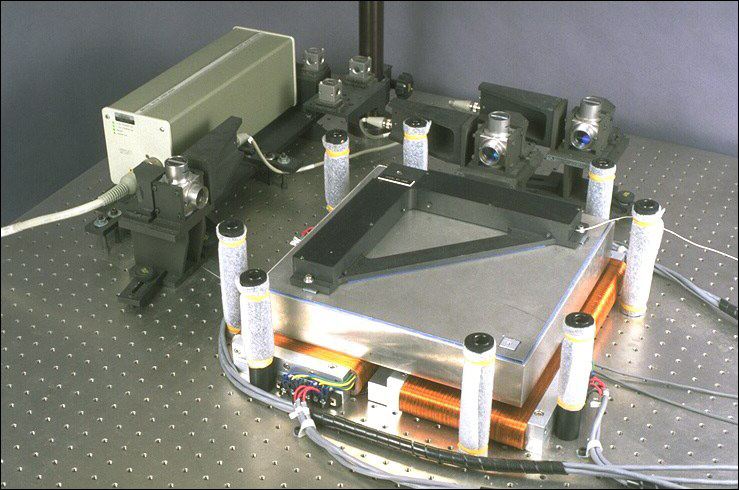
The first picture shows the stage sitting on its four linear motors.
In the background is the laser interferometer which is used for position
measurement for motions in the X-Y plane. This system has nanometer-level
resolution. Motions out of the plane (Z) are measured with three
capacitance gages which are located under the stage.
The stage is made of aluminum skins on an aluminum honeycomb core. A set of
four magnet arrays are attached to the bottom of the stage. The triangular
object on top of the stage is a mirror which reflects the laser beams to
form the moving target in the interferomter.
When active, the stage is levitated 300 micrometers above the rest position
via the four linear motors. Each linear motor is capable of providing a
levitation force in the vertial direction, and a translational force in the
X or Y directions. Two of the motors are oriented in the X-direction and
two motors are oriented in the Y-direction. By coordinating the four
motors, each with two independent forces, the six stage degrees of freedom
can be controlled in a redundant fashion. The control calculations are
carried out on a digital signal processing system at a 4 kHz update rate.
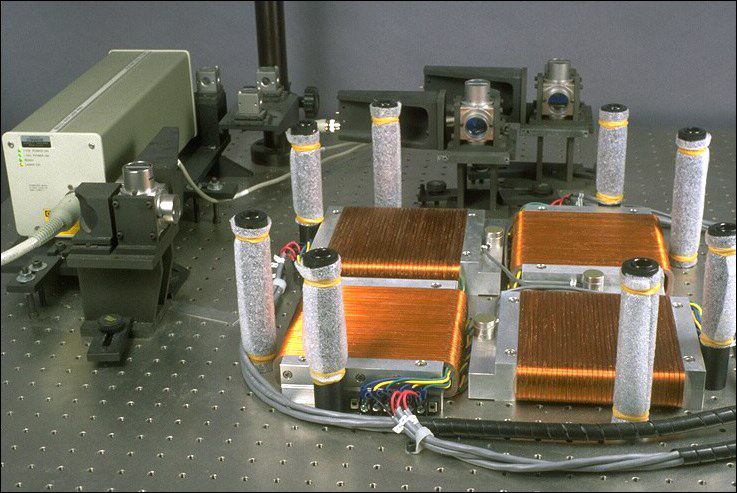
The second photo shows the four motor coil sets with the stage
removed. In this photo you can see that the coils of two of the motors are
oriented in X (right-left) and the coils of two of the motors are oriented
in Y (front-back).