Why Rotating Fluids
Our oceans and atmosphere are perhaps the most visible example of rotating fluids, when viewed within the rotating frame. The figure on your left is a high-resolution image of upper-air analysis centered around the north-pole. The rich structure you see in terms of highs and lows on the pressure contours will evolve dynamically. By clicking here you will be able to see an animation of the GFS forecast from a nice interface created at the University of Wyoming. Along with the 500mb heights, you will also see wind-speed and temperature overlayed in color.The Differentially-heated rotating annulus
The dynamical properties of the large-scale atmospheric circulation can be understood by studying the differentially-heated rotating annulus experiment. When a spinning annulus' center is cooled relative to a warm periphery, the water near the center becomes dense and sinks. Warm waters from the periphery move in to replenish thus setting up a radially overturning circulation. Instability due to strong thermal gradients and rotation rates produces eddies and jets like the mid-latitude atmosphere.In the video below, you see platform with a water-tank. This platform is rotating and the camera is in the rotating frame (that is why the person's hand rotates later in the video). Ice in a can is cooling the core in the middle whilst the periphery of the water-tank is forced by ambient room temperature. Notice how the dye (red is warm, green is cold) evolves. The rich structure so formed arises from dynamics similar to the large-scale problem.
Overview of Coupled Physical-Numerical System
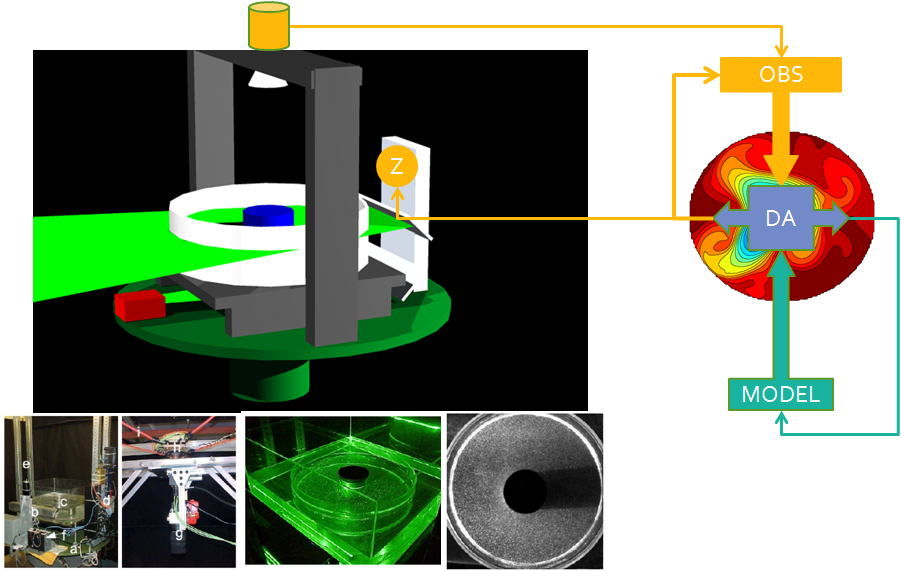
We built an automated observatory for rotating fluids and study the differentially heated rotating annulus. By observatory we mean three things: A physical simulation as you see above from which observations are gathered automatically, a numerical simulation, and algorithms that constrain models with observations. All three embody the concept of an observatory as a single coupled system with which to understand the fluid, and the system functions in realtime.
The physical component of the coupled system, as seen in the figures and will be evident in videos to follow, consists of a fluid embedded with neutrally bouyant particles, a laser, a robotic arm to illuminate particles in a plane, a camera to watch them move, all of which sit on a turntable spinning with periods between 3-8 seconds.
The computational component is highly distributed and heterogenous. This subsystem produces measurements (velocities via optic flow), model states (via numerical simulation), and estimates of model-states (and their uncertainties) conditioned by observations. We have achieved realtime performance by using many tricks: Nonuniform discretization, spatial domain decomposition, spectral decomposition, and something we think is new; a monte-carlo (ensemble or particle) tracking algorithm with novel way to represent and sample from the distribution of model-state's uncertainty.