| HOME | THE CONTEST | TEAM MEMBERS | THE ROBOT | STRATEGY | PICTURES | CONTACT US |
| Robot | ||
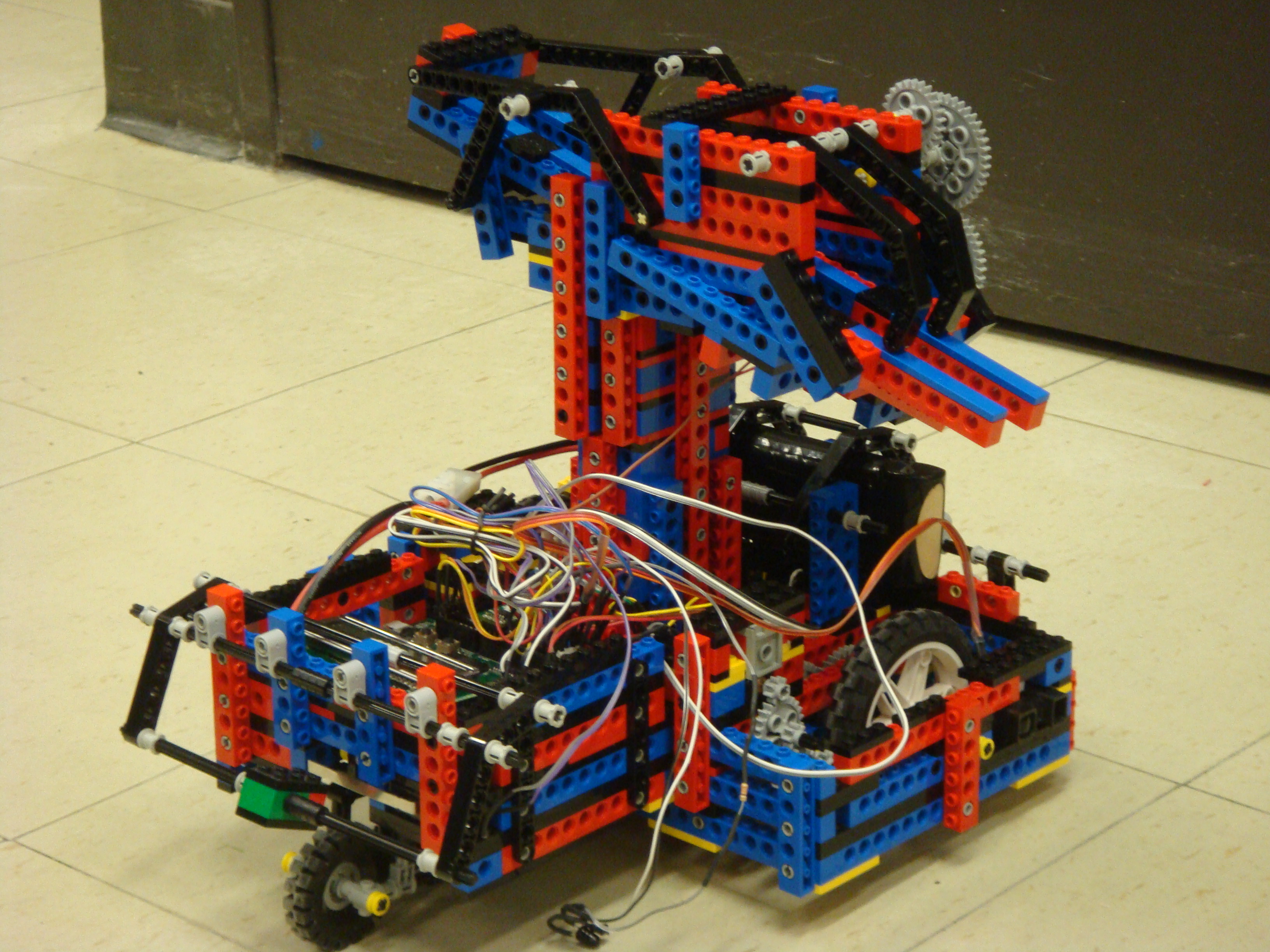
| "Awesome-O-Tron" | ||
|
Awesome-O-Tron was designed with one thing in mind: Simplicity. It is designed only to drive straight, drop balls, and drive backwards. It doesn't follow lines, it doesn't implement bump sensors, and it doesn't sense distances. It uses one phototransistor to sense the color of its starting location, two distance sensors to detect the presence of walls (for initial orientation) and an encoder to determine how far the robot has travelled. We focused on bracing the robot extensively as well. We are quite convinced that our robot could be thrown and would survive the impact. During the testing of our robot we ran into several programming issues that were extremely tricky to solve. We've compiled a small video detailing the evolution of our robot and displaying some of its more notorious failures. Enjoy!
|
||