|
One of the major problems when developing object detection algorithms is the lack of labeled data for training and testing many object classes. The goal of this database is to provide a large set of images of natural scenes (principally office and street scenes), together with manual segmentations/labelings of many types of objects, so that it becomes easier to work on general multi-object detection algorithms. This database was created by Antonio Torralba, Kevin P. Murphy and William T. Freeman. Downloads For getting the database and Matlab code follow the next link: Download Database If you find this dataset usefull, help us to build a larger dataset of annotated images (which will be made available very soon) by using the web annotation tool written by Bryan C. Russell at MIT:
Overview of the database content Here there are some of the characteristics of the database:
Limitations:
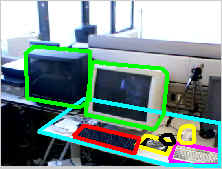
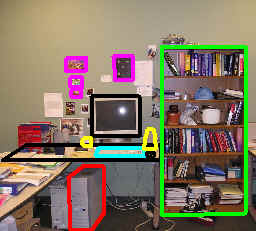
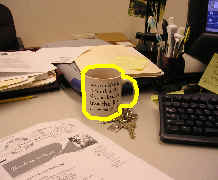
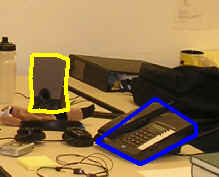
The following images show some example of annotated frames (static frames and sequences):
Each labeled image in the database is associated with an annotation ASCII file. This is an example of one annotation file:
Objects The next table is a list of all the object labels used in the annotations. Some of the labels correspond to parts of objects. The objects denoted with a (*) are interesting object for training detectors (interesting means that there are a reasonable number of annotated instances and some control for the variability of the object appearance):
Regions:
| ||||||||
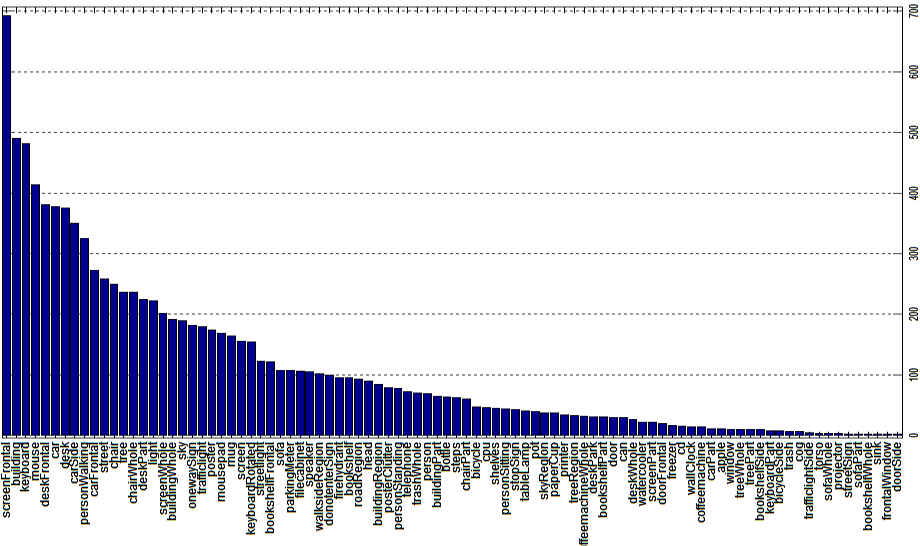
| Here there is a histogram of counts for each labeled object (or parts of objects). The vertical axis is the number of labeled instances (resolution varies).
Places and scenes The frames are also labeled according to scene type (office, corridor, street, conference room, etc.)
| ||||||||
| Structure of the annotation files This is an example of one annotation file:
The size of the image: size {427 640 3}
One object is described by a polygon: makePolygon {Polygon 1} mouse {457 279 464 281 471 281 470 277 464 276 460 276}
The field "labels" allows to add additional information to describe an object. For instance, in the case of a "face", we might want to add information like the gender or the identity. The labels can be arbitrary:
makePolygon {1} frontalFace {139 136 206 136 146 219 197 220 110 126 150 126 188 127 225 124 107 141 123 140 152 140 191 139 222 138 234 140 172 173 161 180 183 180 171 204 171 240 171 271} labels {{gender:male}{identity:pepe}{label 3:property 3}{label 4: property 4}}
We can then query to find objects with specific labels: keys = queryDB(DB, 'findObject', 'frontalFace', 'findLabel', 'gender=male');
| ||||||||
| MATLAB tools for handling the annotation files
We have developed some MATLAB tools for using the database. The first set of function allows to read and create annotation files. The second set of function provides higher-level functions for indexing the annotations.
Reading and plotting images
There are four basic functions for reading, writing and plotting the annotation files:
All these four functions describe the polygons on an image using a struct array:
pf(:).class Queries to the database There are some basic MATLAB tools to make queries to the database in order to locate the frames that contain specific objects or scenes.
1) First you have to create the database.
DB = makeDB('C:/images', 'C:/anno', 'C:/places')
The arguments are the directories in which the images, object annotations and place labels are stored. The result of this function is the struct 'DB' which is an index for the database. This operation will take some time but you only have to do it once. Once is done, you can store the struct DB somewhere for future use.
2) Searching the database
>> load DB >> keys = queryDB(DB, 'findObject', 'screenFrontal');
'keys' are pointers to frames and objects within each frame. For instance: >> keys(1)
This indicates that the first image that contains a 'screenFrontal' is frame number 318, and the object is number 3 in the annotations. Therefore:
>> DB.frame(318).objects(3)
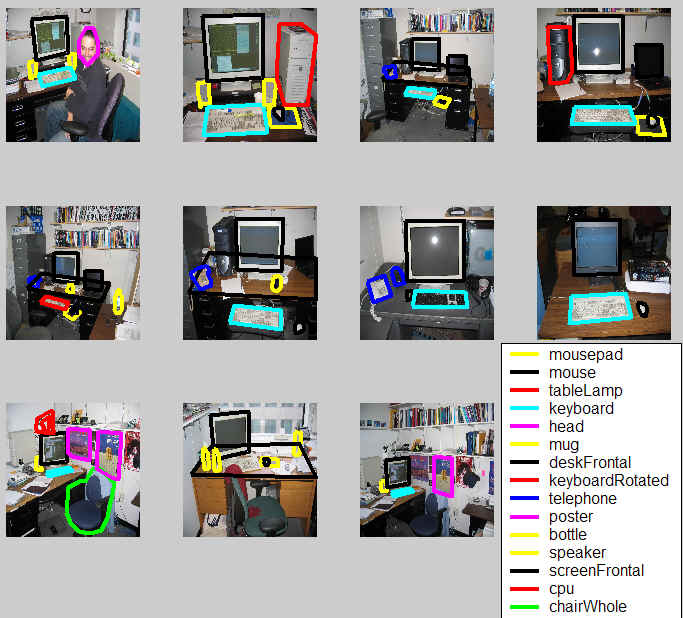
You can visualize some of the images with:
Some other query examples:
>> keys = queryDB(DB, 'findObject', 'coffeemachineWhole', 'findObject', '~freezer', 'findObject', '~desk*'); >> showImages(DB, keys.frame);
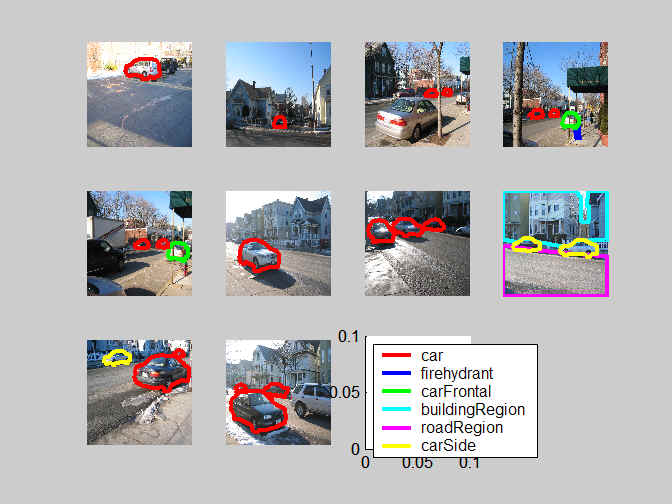
>> keys = queryDB(DB, 'findObject', 'car*');
3) Searching points of views
For some objects, we have also labeled the point of view. The labeling of the point of view is done by adding one line into the annotation file, just after the object polygon. For instance: makePolygon {Polygon 6} screenFrontal {130 237 132 295 199 290 197 235} view {270 -999}
Here there are some examples of objects and the views used:
It is possible to find objects in the database using the point of view as a query argument:
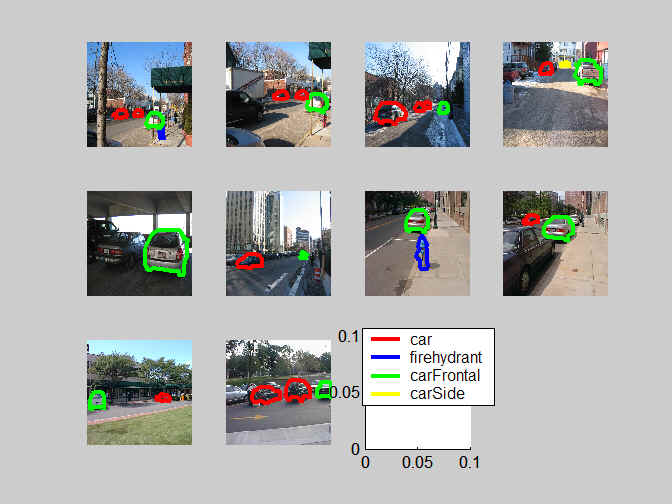
>> keys = queryDB(DB, 'findObject', 'car*', 'findAzimuth', 90); >> showImages(DB, [keys(1:10).frame])
This returns frames that contain views of backs of cars (and other objects too):
4) Querying folders
Using folder names in the query is useful to create training and test datasets that are independent. Here we give some examples of useful queries:
Get all sequences: keys = queryDB(DB, 'findFolder', 'seq');
Get all static pictures: keys = queryDB(DB, 'findFolder', 'static');
Get all images retrieved from the web: keys = queryDB(DB, 'findFolder', 'web');
Get all images from building 200 (old AI-Lab building): keys = queryDB(DB, 'findFolder', 'bldg200');
Get all images from Stata center (new CSAIL building): keys = queryDB(DB, 'findFolder', 'stata');
Queries can be combined to locate instances of an object within a set of images:
keys1 = queryDB(DB, 'findObject', 'frontalScreen', 'findFolder', 'bldg200'); keys2 = queryDB(DB, 'findObject', 'frontalScreen', 'findFolder', 'stata');
Now, keys1 and keys2 are pointers to images containing "screens" taken in different buildings and therefore, provide a possible split in training and test sets.
5) Searching scenes
keys = queryDB(DB, 'findLocation', '400_fl_608');
|