We consider the problem of detecting a large number of different classes of objects in cluttered scenes. Multi-class object detection requires applying a battery of different classifiers, at multiple locations and scales, to the image. This can be computationally expensive: if independently trained object detectors are used, the computational cost scales linearly with the number of objects to be detected. It seems unlikely that such an approach will scale up to allow recognition of hundreds or thousands of objects.
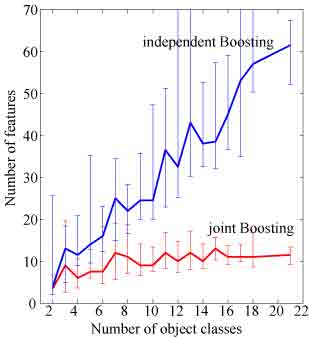
We present a multi-class boosting procedure that reduces the computational complexity by promoting feature sharing among the different object classes (or among the different views of a single object). The algorithm learns a common set of features that defines the different categories of objects (or different views). For a given recognition level, the number of features required, and therefore the computational cost, is observed to scale approximately logarithmically with the number of objects to be detected.
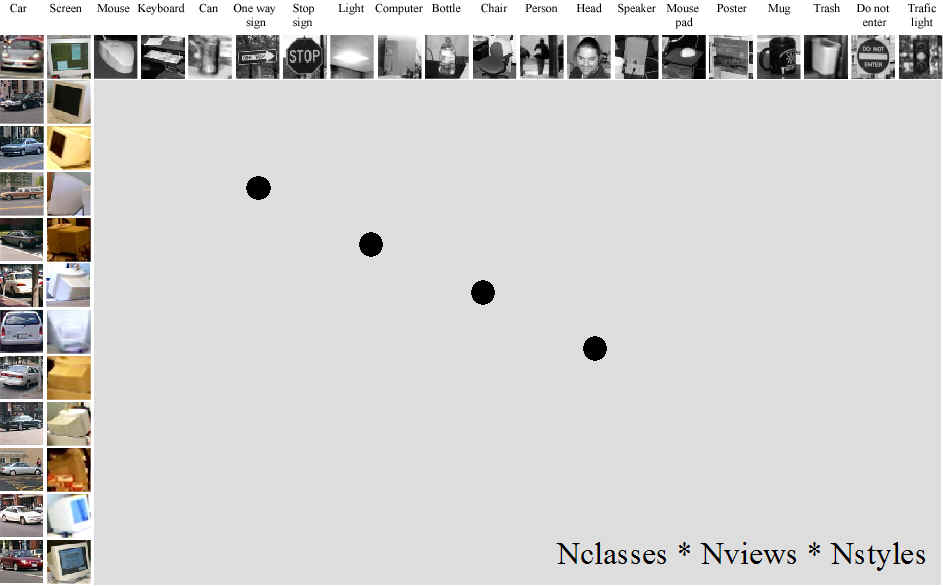
Datasets
-
Images
-
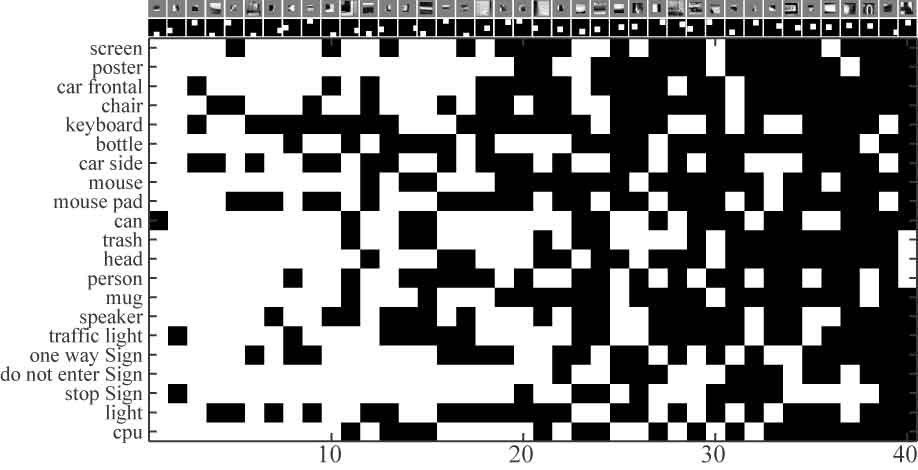
Labels
