|
Soy una investigadora en DeepMind y trabajo en manipulación robótica. Acabo de obtener mi doctorado en el MIT trabajando con el Profesor Alberto Rodríguez. Desarrollo algoritmos y soluciones que permiten a los robots resolver nuevas tareas con gran precisión y destreza. Mi investigación ha sido financiada por las becas de LaCaixa y Facebook. {first_name}0bauza@gmail.com / CV / Bio / Google Scholar / LinkedIn |
|
|
Mi investigación se centra en el desarrollo de algoritmos para la generalización robótica precisa: hacer que los robots sean capaces de resolver muchas tareas sin comprometer su rendimiento y fiabilidad. Al aprender modelos probabilísticos de percepción y control, podemos proporcionar a los robots las herramientas adecuadas para prosperar en situaciones y tareas variadas. En mi trabajo, he estudiado cómo el aprendizaje de modelos probabilísticos permite un control preciso y cómo el desarrollo de una percepción de tacto y vision precisa permite resolver tareas complejas, como coger, localizar y colocar con precisión nuevos objetos sin experiencia previa. Mi objetivo es continuar desarrollando algoritmos que hagan que los robots sean diestros y versátiles al manipular su entorno. Nuestro último trabajo: recogida y colocación precisa de objetos sin experiencia previa! ¿Porque es esto importante? Actualmente, la industria no puede resolver este problema para una gran variedad de objetos. Nuestro sistema abre la puerta a soluciones robóticas en una amplia variedad de aplicaciones donde la flexibilidad es clave. |
|
|
Agosto 2022 Defensa tesis: Precepcion con vision y tacto para manipulation robotica de gran destreza(video). Julio 2022 Charla invitada en el workshop de RSS 2022 sobre la ciencia de golpearse con cosas (The Science of Bumping Into Things). Mayo 2022 Co-organizacion en ICRA 2022 del workshop de Manipulacion bimanual: como resolver los retos en el mundo real (Bi-manual Manipulation: Addressing Real-world Challenges). Marzo 2022 Charlas invitadas en EPFL, Princeton University, CMU y University of Pennsylvania. Febrero 2022 Charlas invitadas en Columbia University, the Autonomy Talks at ETH Zurich y Cornell Tech. Diciembre 2021 Charla invitada en Washington University robotics colloquium. Noviembre 2021 Charla invitada en Stanford y CMU Manipulation discussion grup. Octubre 2021 Charla invitada en Cornell Robotic Seminar y seleccionada para asistir a las estrellas en ascenso de EECS (Rising Stars in EECS). Julio 2021 Asisti al workshop de pioneros de RSS (2021 RSS Pioneers Workshop). Mayo 2021 Finalista para el premio de mejor articulo de robots de servicio en ICRA 2021 Marzo 2021 Charla invitada en el seminario de AI de la universidad de Toronto. Octubre 2020 Charla invitada en el seminario GRASP de University of Pennsylvania. Mayo 2020 Co-organizacion del workshop de ICRA 2020 sobre Incertidumbre en las interacciones con abundante contacto (Uncertainty in Contact-Rich Interactions). Noviembre 2019 Seleccionada para atender la cumbre mundial de jovenes cientificos (Global Young Scientists Summit). Otorgada solo a 5 estudiantes de doctorado entre todos los departamentos de MIT. Octubre 2019 Seleccionada como estrella en ascenso en ingenieria mecanica (Rising Stars in Mechanical Engineering). Otorgada a 30 estudiantes mujeres de doctorado y postdoctorado a nivel internacional. Enero 2019 Recibi la beca de Facebook para el doctorado (Facebook Emerging Scholar Award). Entregada a 21 de las 900 aplicaciones. Diciembre 2018 Recibi la beca de NVIDIA para el doctorado (NVIDIA Graduate Fellowship). Entregada a 10 de las mas de 30 aplicaciones. |
|
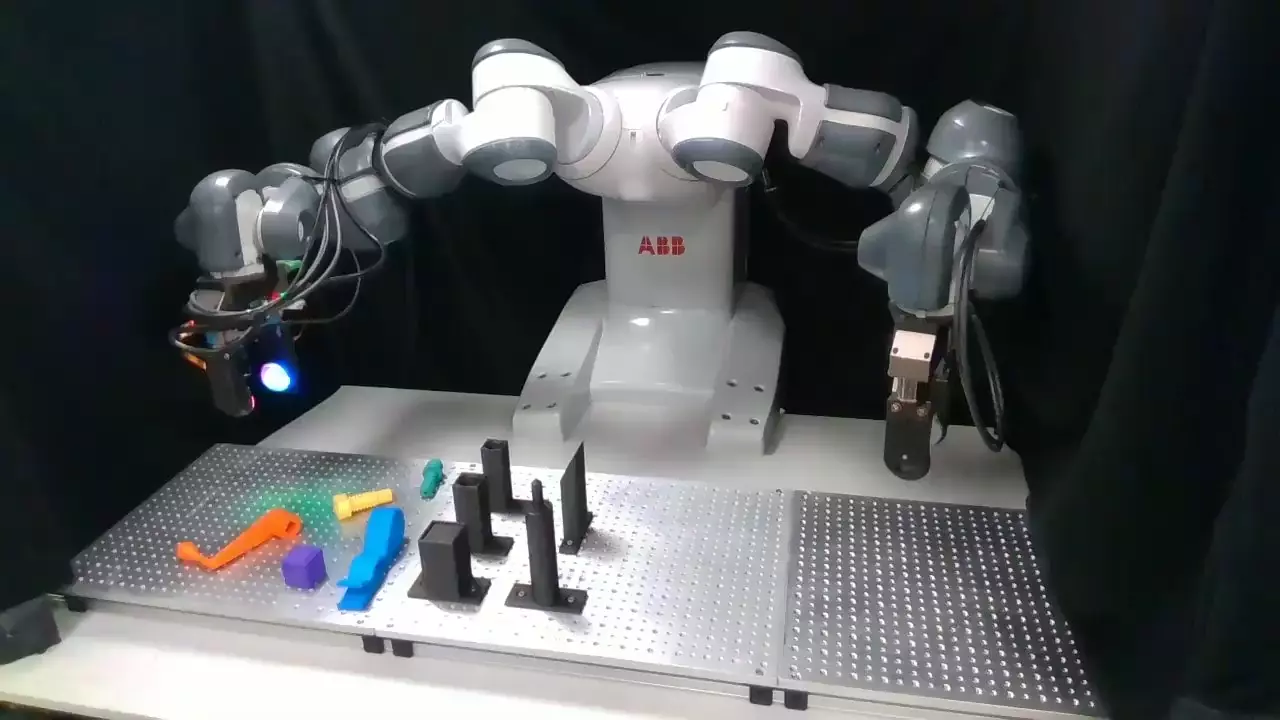
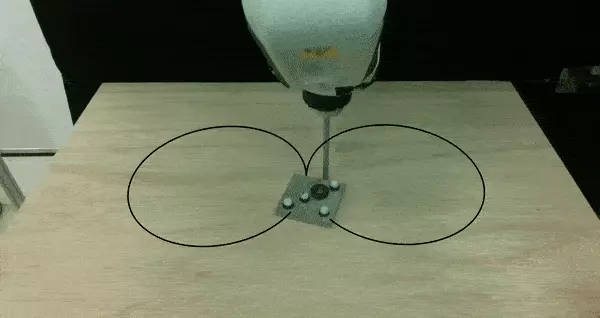
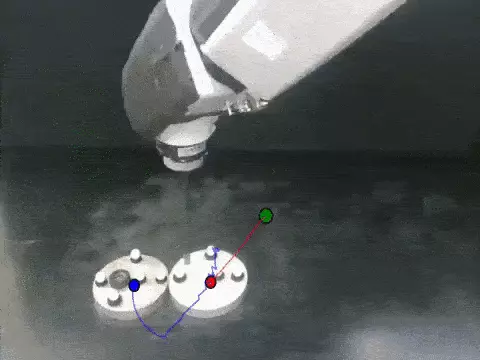
M. Bauza, T. Bronars, Y. Hou, N. Chavan-Dafle, A. Rodriguez in progress , 2022 Aprendemos en simulación cómo recoger y colocar objetos con precisión usando vision y tacto. Nuestra solución transfiere al mundo real, manejando con éxito diferentes tipos de objetos sin necesidad de experiencia previa. |
|
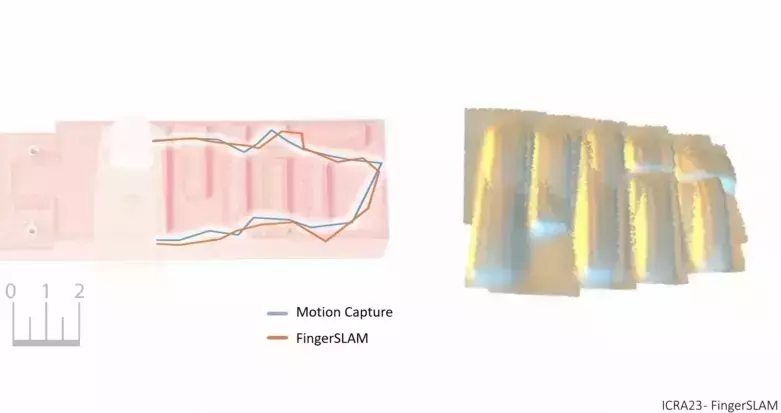
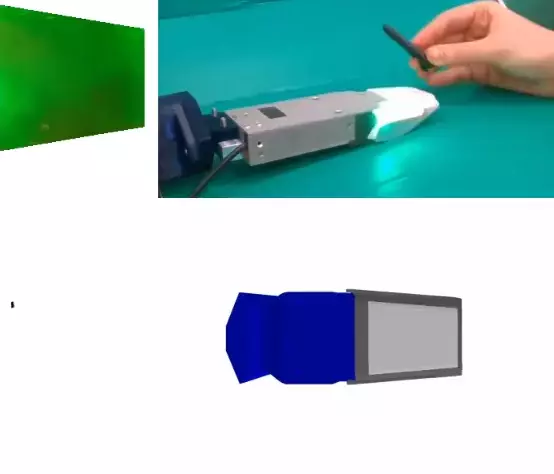
J. Zhao, M. Bauza, E. Adelson under review, 2022 Estudiamos el uso de la vision y el tacto para la localización con 6-GdL y la reconstrucción 3D de objetos desconocidos dentro de la mano. |
|
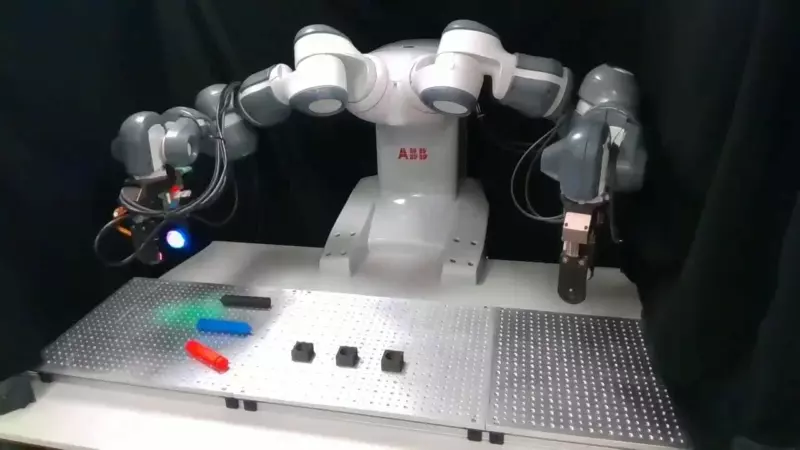
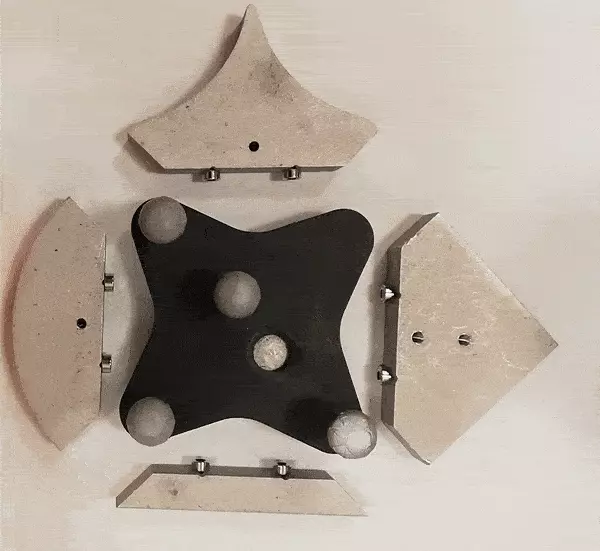
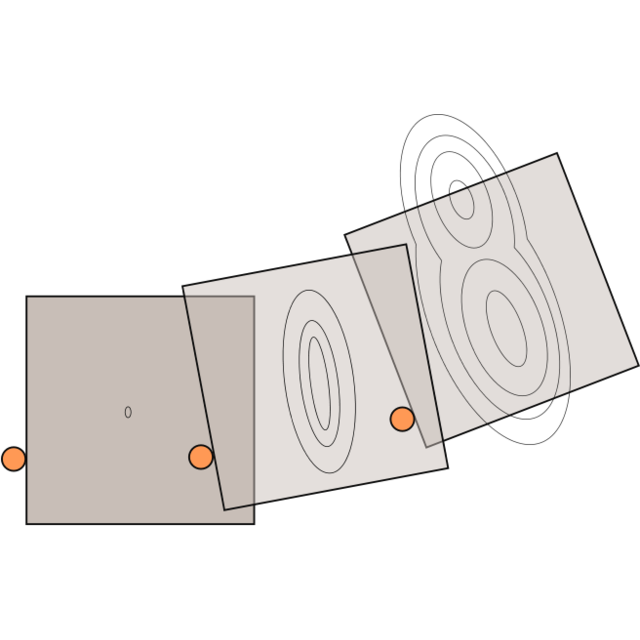
M. Bauza, T. Bronars, A. Rodriguez under review, 2022 Aprendemos en simulación cómo localizar objetos con precisión con el tacto. Nuestra solución transfiere al mundo real, brindando distribuciones de posición y orientación fiables desde el primer contacto. Nuestra tecnologia se usa en Magna, ABB y MERL. Nuestro sensor tactil es Gelslim. |
|
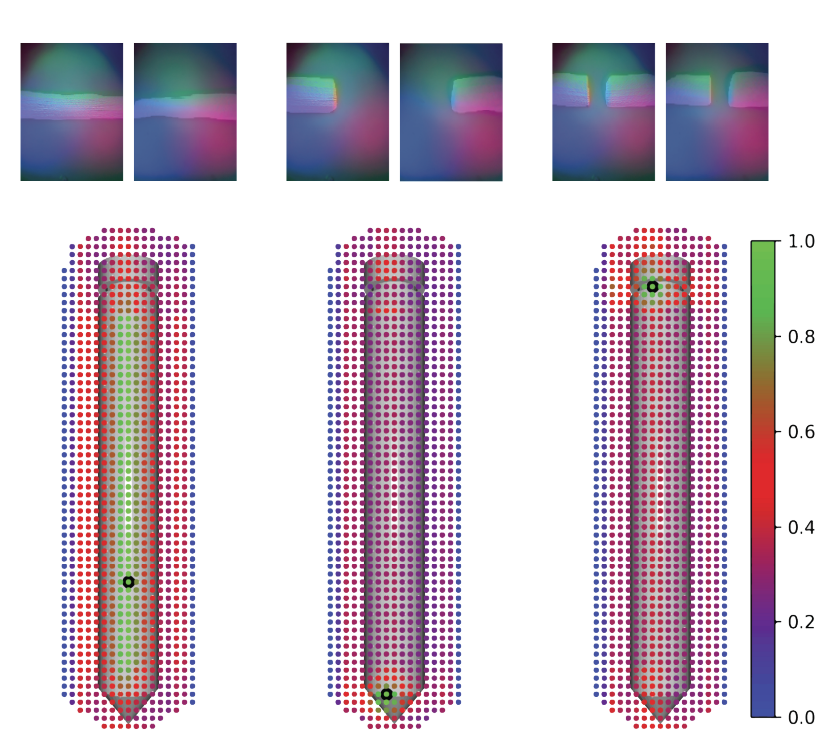
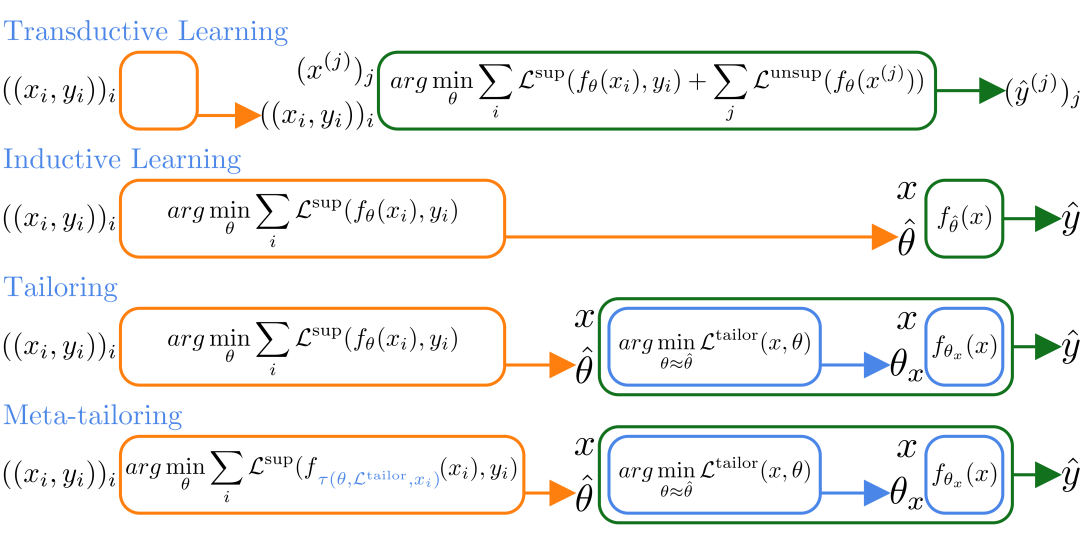
F. Alet, K. Kawaguchi, M. Bauza, N. Kuru, T. Lozano-Perez, L. Kaelbling NeurIPS, 2021 Creamos un modelo individual para cada punto, optimizando objetivos no supervisados. Asi evitamos brechas de generalización y podemos imponer una amplia variedad de estructuras. |
|
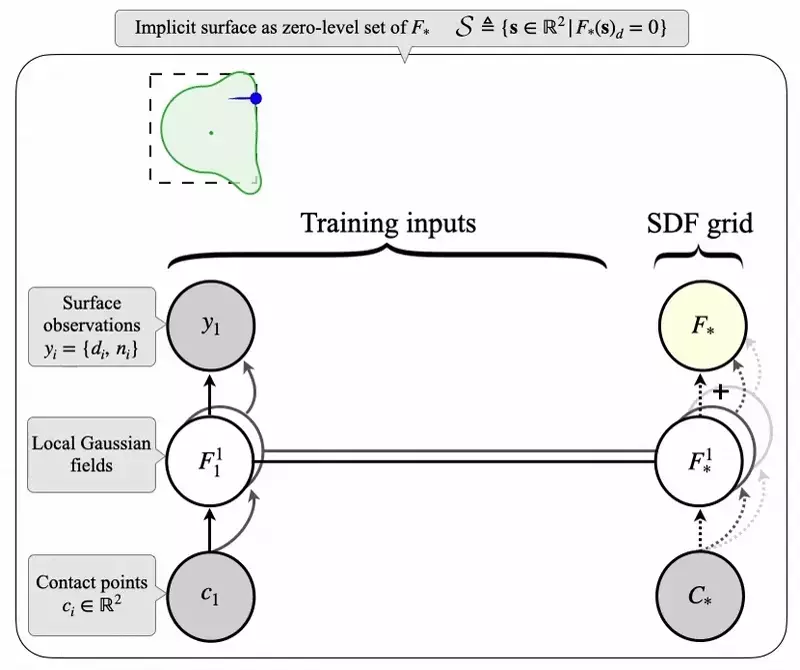
S. Suresh, M.Bauza, A. Rodriguez, J. Mangelson, M. Kaess ICRA, 2021 (Best Paper Finalist on the ICRA21 Service Robotics Award) PDF / video / codigo / pagina web En tiempo real, inferimos de los empujes planos tanto la forma como la pose de un objeto. |
|
M. Bauza, E. Valls, B. Lim, T. Sechopoulos CORL, 2020 PDF / video / pagina web |

|
A. Kloss, M. Bauza, J. Wu, J. Tenenbaum, A. Rodriguez, J. Bohg ICRA, 2020 PDF / video |

|
M. Bauza, O. Canal, A. Rodriguez ICRA, 2019 PDF / video / pagina web Reconstrucción de la forma y localización de objetos utilizando el sensor táctil basado en visión GelSlim. |
|
Y. Lin, M. Bauza, P. Isola CORL, 2019 PDF / codigo / pagina web Aprender a codificar nuevos objetos para generar predicciones de video físicamente plausibles. |

|
M. Bauza*, F. Hogan* , O. Canals, A. Rodriguez IROS, 2018 (Best Poster Award at ICRA 2018 workshop) PDF / video Reagarre usando un sensor táctil de alta resolución para mejorar la estabilidad de agarre. |
|
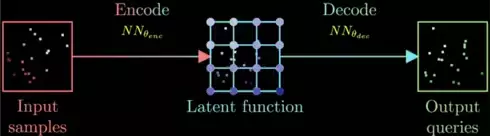
F. Alet, A. Jeewajee, M. Bauza, A. Rodriguez, T. Lozano-Perez, L. Kaelbling ICML, 2019 (Oral Presentation) PDF / video / pagina web Aprendemos a mapear de funciones a funciones mediante la combinación de redes neuronales en grafos y un mecanismo de atención. |
|
M. Bauza, F. Alet, Y. Lin, T. Lozano-Perez, L. Kaelbling, P. Isola, A. Rodriguez IROS, 2019 PDF / pagina web Presentamos un gran conjunto de datos de alta calidad sobre empujes plano que incluye video RGB-D y una amplia variabilidad de objetos. |
|
M. Bauza*, F. Hogan* , A. Rodriguez CORL, 2018 PDF / video Exploramos la complejidad de los datos necesarios para controlar, en lugar de modelar, el empuje plano. |
|
A. Ajay, M. Bauza, J. Wu, N. Fazeli, J. Tenenbaum, A. Rodriguez ICRA, 2019 PDF / pagina web Proponemos un modelo dinámico híbrido, redes de interacción aumentadas por simulador, que combina un simulador de física con una red neuronal basada en objetos. |
|
A. Ajay, J. Wu, N. Fazeli, M. Bauza, L. Kaelbling, J. Tenenbaum, A. Rodriguez IROS, 2018 (Best Paper Award on Cognitive Robotics) PDF / pagina web Aumentamos un simulador analítico de cuerpo rígido con una red neuronal que aprende a modelar la incertidumbre como residuos. Premio al mejor artículo sobre robótica cognitiva en IROS 2018. |

|
A Zeng, S Song, K. Yu, E. Donlon, F. Hogan, M. Bauza, et. al. ICRA, 2018 (Best Systems Paper Award by Amazon Robotics) PDF / video / pagina web Con el equipo de MIT-Princeton desarrollamos un sistema robótico robusto para reponer objetos. |

|
M. Bauza, A. Rodriguez WAFR, 2018 Desarrollamos el algoritmo GP-SUM: un filtro GP-Bayes que propaga en el tiempo incertidumbres no gaussianas. |
|
M. Bauza, A. Rodriguez ICRA, 2017 La caracterización de la incertidumbre de los diferentes empujes permite una mejor selección de acciones. |

|
K. Yu, M. Bauza, N. Fazeli, and A. Rodriguez IROS, 2016 (Finalista aMejor Articulo en IROS) PDF / video / pagina web Más de un millón de datos recopilados en experimentos de empuje reales. |
|
Gracias por compartir este diseño de pagina web. |