The DIY Segway
Questions? Comments? Generous donations?
Contact Us!
![]() This project was sponsored by
The Edgerton
Center at MIT.
This project was sponsored by
The Edgerton
Center at MIT. ![]()
If you or your business would be interesting in sponsoring the FIRST robotics teams involved with this project and making future projects possible, please contact us.
UPDATE - 7/17/08
Summer 2008 is here, and you'd be correct to suspect that a new project is also in the works. Check out the Cap Kart, a unique electric go-kart with some special features...

Also, check out these awesome new self-balancing projects from around the web:
- Segskate from the University of Minnesota
- The Two Wheel Deal from Purdue
- A self-balancing skateboard made by Clint Rutkas
- From the UK: John Dingley's self-balancing skateboard
UPDATE!
This page has been featured on: (in no particular order)
- Gizmodo
- Engadget
- MAKE: Blog
- SciFi Tech
- Digg
- SlashGear
- AutoblogGreen
- TechEBlog
- The Deliverator
- Wired Blogs: Gadget Lab
- G4 - The Feed
- Along with radio coverage on Boston's 90.9 WBUR
Mention us but you're not on this list? Email the webmaster.
VIDEO UPDATE - 8/30/07
The DIY Segway made a trip out to Wayland HS, where it was put to the test by some of the designers, who also happen to be the more experienced riders. The video features some of the things our Swapfest appearance did not get to show off, including performance on an incline, performance on grass (not great, but with 12.5" wheels, we weren't expecting to do much off-roading), turning in place, and clearing a 2.5" tall camera, with 2.5" to spare. Can your Segway do that?
MORE PICTURES - 9/14/07

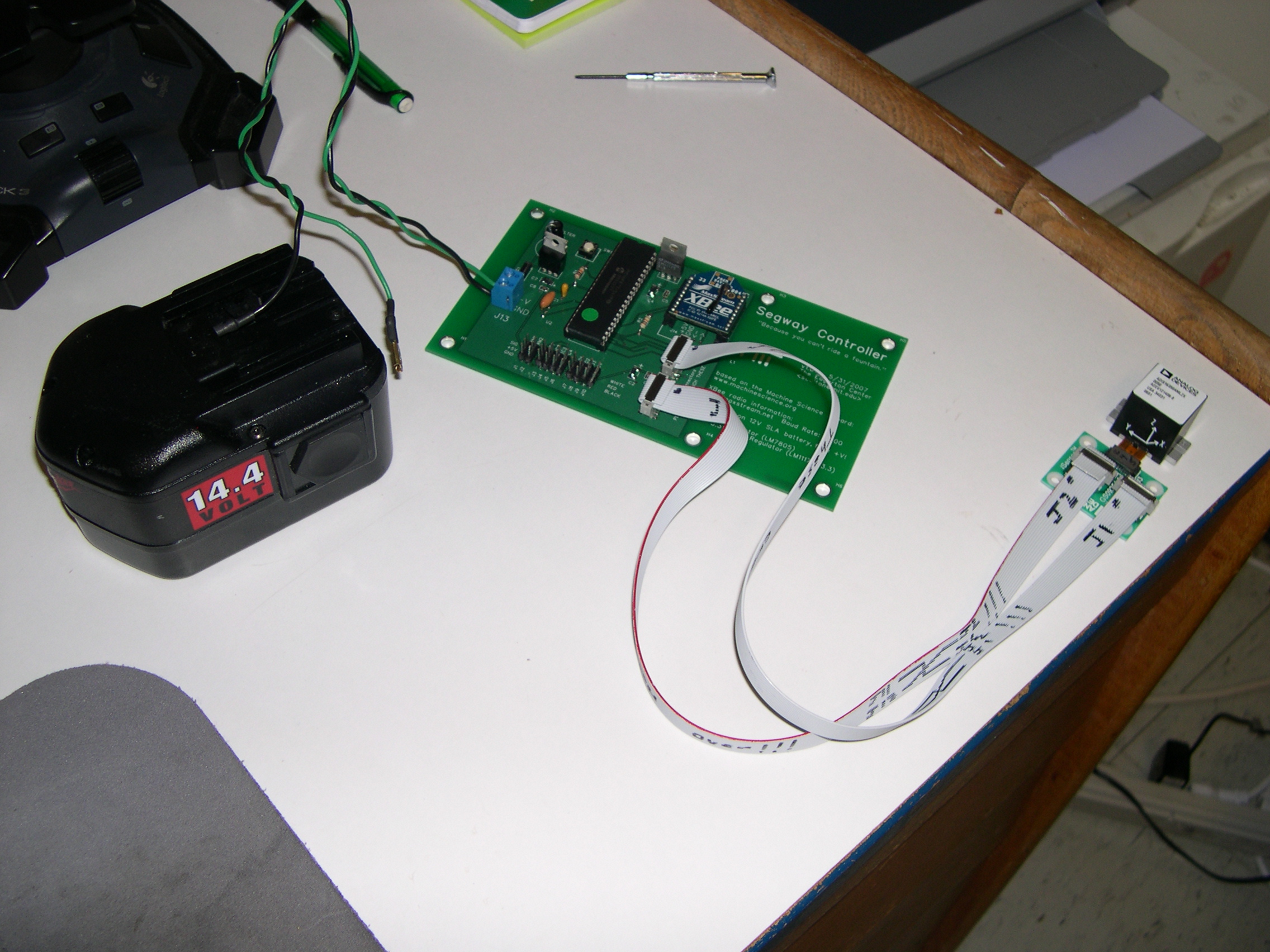

Table of Contents
- Who are we?
- Why?
- How does it work?
- Designing a Segway
- Construction
- Electronics
- Software
- The DIY Segway goes to Swapfest
- To-Do List
- Miscellaneous
More technical documentation now available.
Who are we?
We are a group of students from Wayland High School, John D. O'Bryant School of Math and Science, and Cambridge Rindge and Latin School working with four MIT students. We all have worked on FIRST Robotics teams and have some background in engineering. During the FIRST Robotics competition in Atlanta this year, we had an idea...
Links to FIRST teams' sites:Why?
FIRST Robotics is a lot of fun. However, it occupies around eight weeks of any given year, usually. Eight weeks out of fifty-two leaves plenty of time for other projects. In Atlanta this year we were brainstorming what strange contraptions we could throw together over the summer. Although Ed, a technical instructor at MIT who works with our team, suggested a fountain, Shane had been saying it would be easy to build a Segway and we called him on it. Besides, you can't ride a fountain...
How does it work?
When looking at a scooter on two wheels automagically balancing itself, it may seem an almost impossible feat. However, the way a balancing scooter works is rather simple.
Think of it this way: When you stumble, you don't (usually) let yourself fall flat on your face. Instead, you put a foot in front of you to "catch up" with you and get below your center of gravity. The segway works in the same way -- when it detects you leaning forward, it moves forwards to catch up. When it detects you leaning backward, it moves backwards to catch up.
Designing a Segway
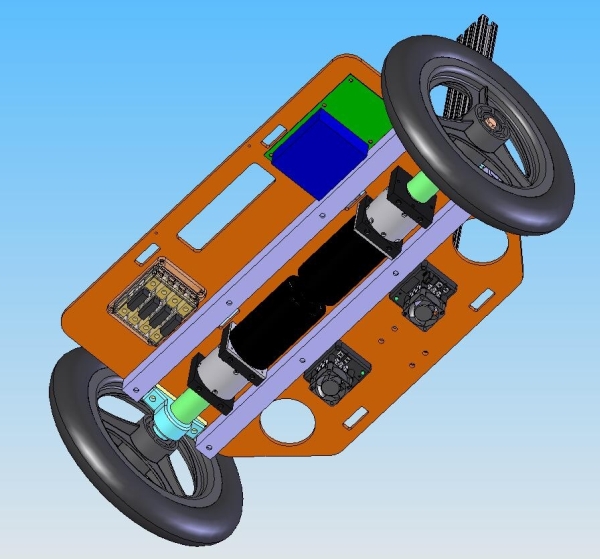
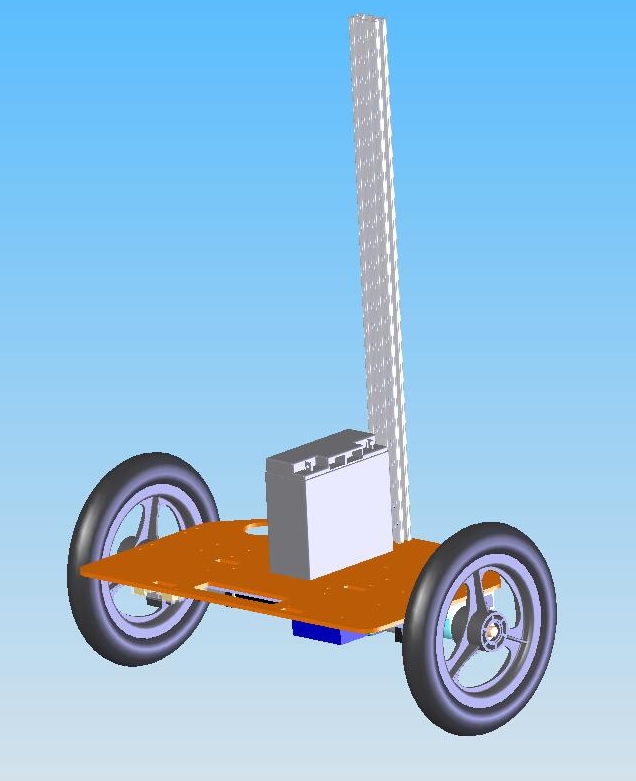
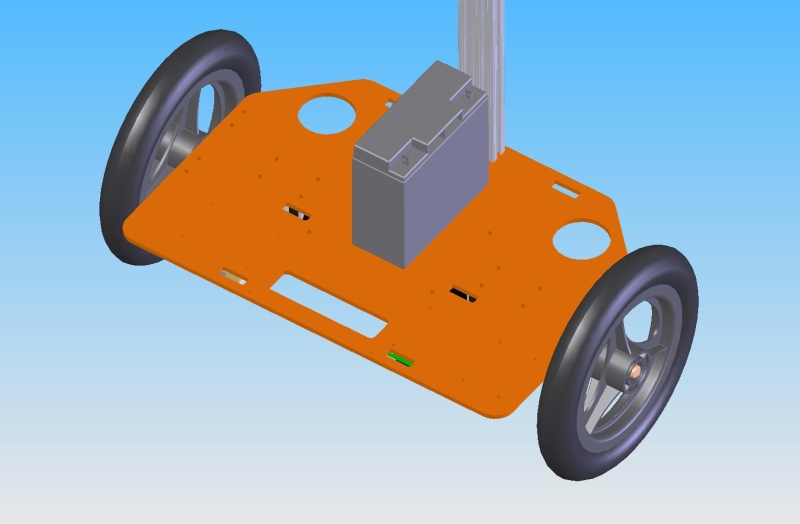
When designing a segway, there's a lot to consider. You have to make sure that the motors you're using have enough torque to move the weight of a person around and keep them from falling. You have to be careful that the motor shafts won't snap when a person hops onto the scooter. And of course, you have to make sure it can go fast and look cool. In addition to all that, we aimed for a few other features in our early design process. We wanted to:
- Have it weigh less than 50 pounds with the battery
- Spend less than $1000
- Be able to ride our scooter through doors
- Have "lean steering"
For more design-related stuff, check out the notes from our design meeting.
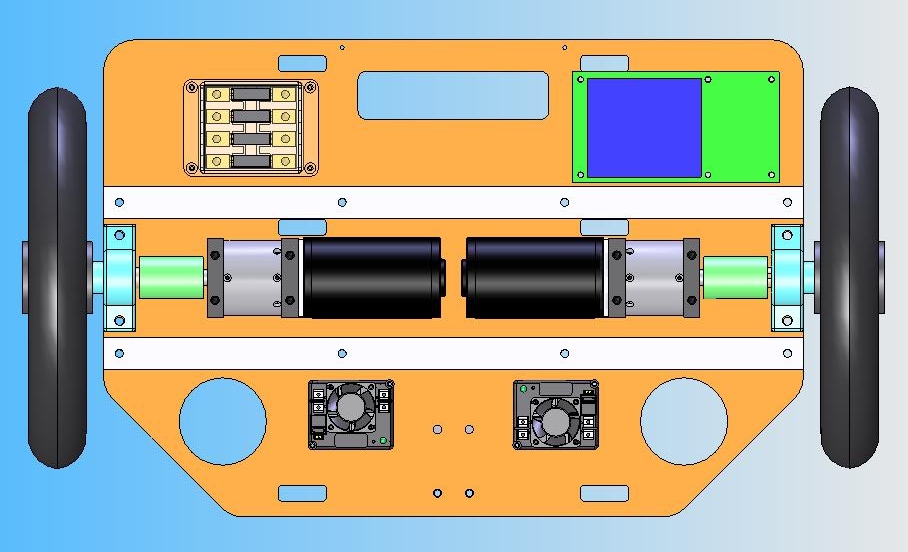
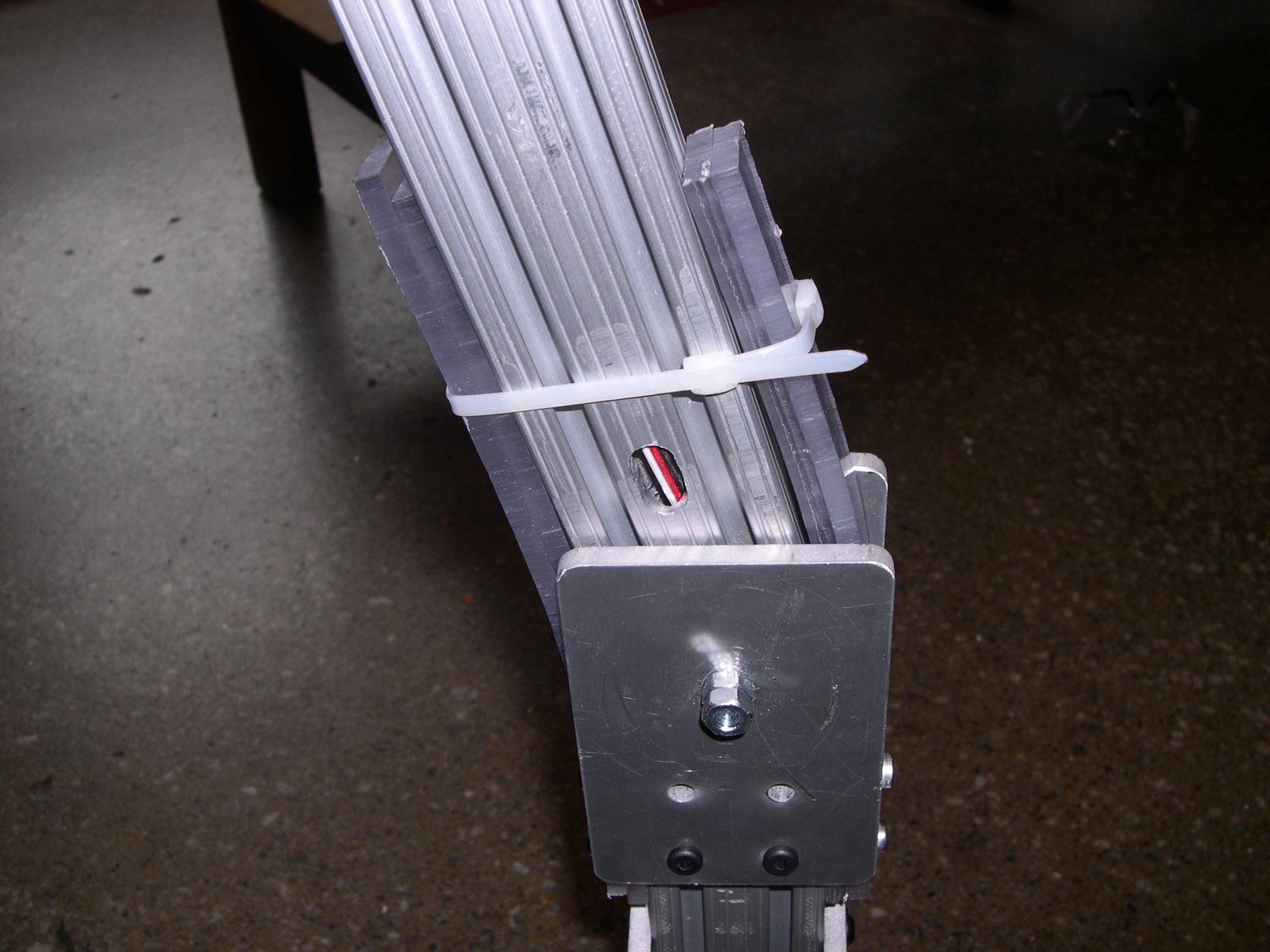
Construction
Once we designed our DIY Segway, we ordered parts and cut our aluminum baseplate on the waterjet in MIT's Hobby Shop. It took us three to four meetings to fully put together our segway, although what required the most tweaking was the damping on our lean steering mechanism. We tried a few different methods before we finally got that right. As of now we're using pieces of lexan that act as leaf springs.

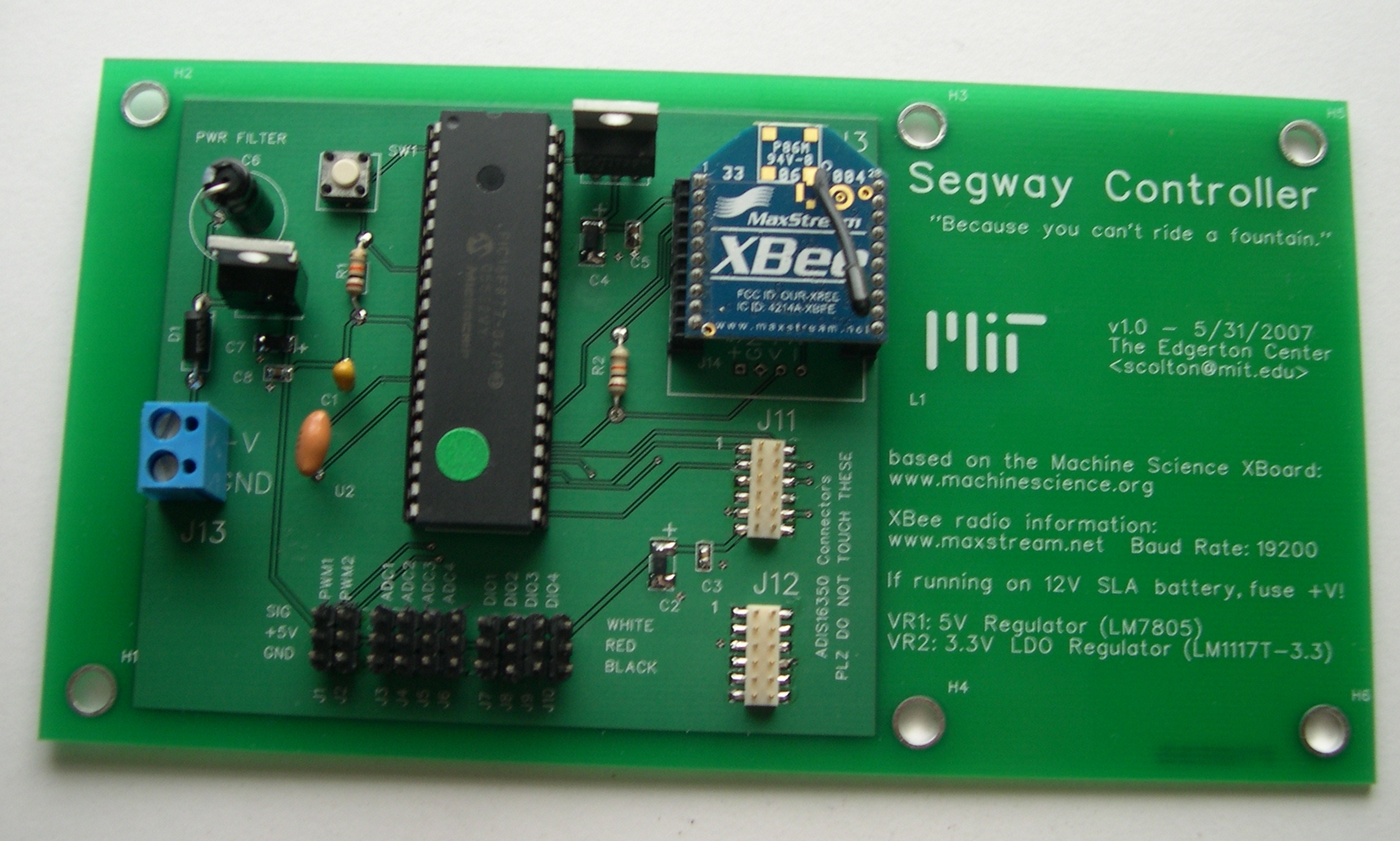
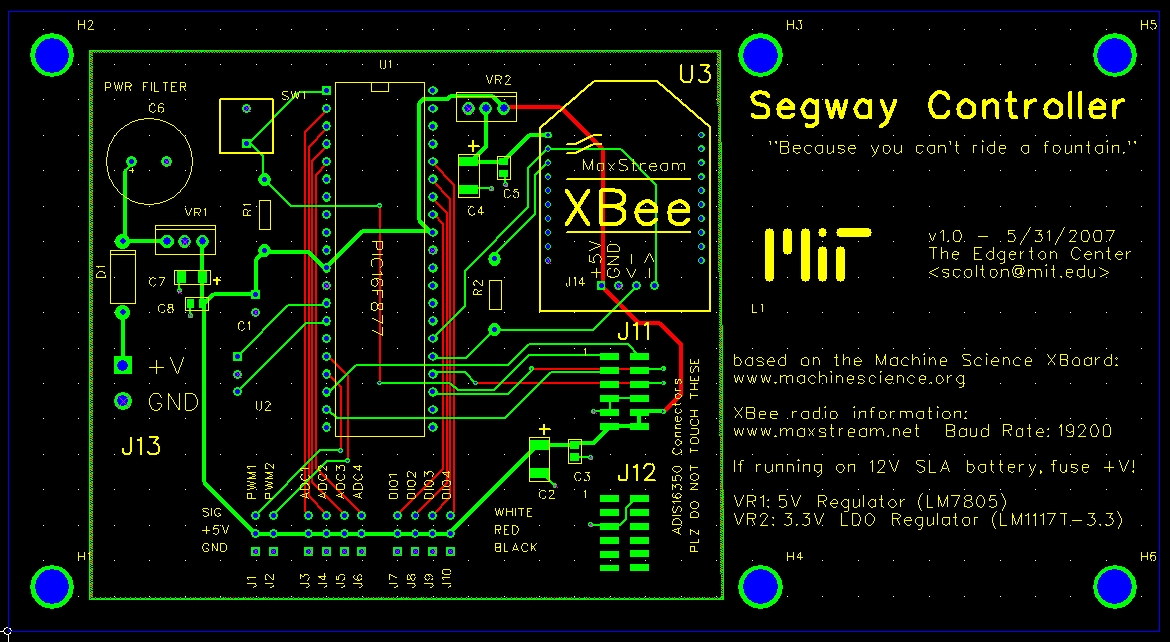
Electronics
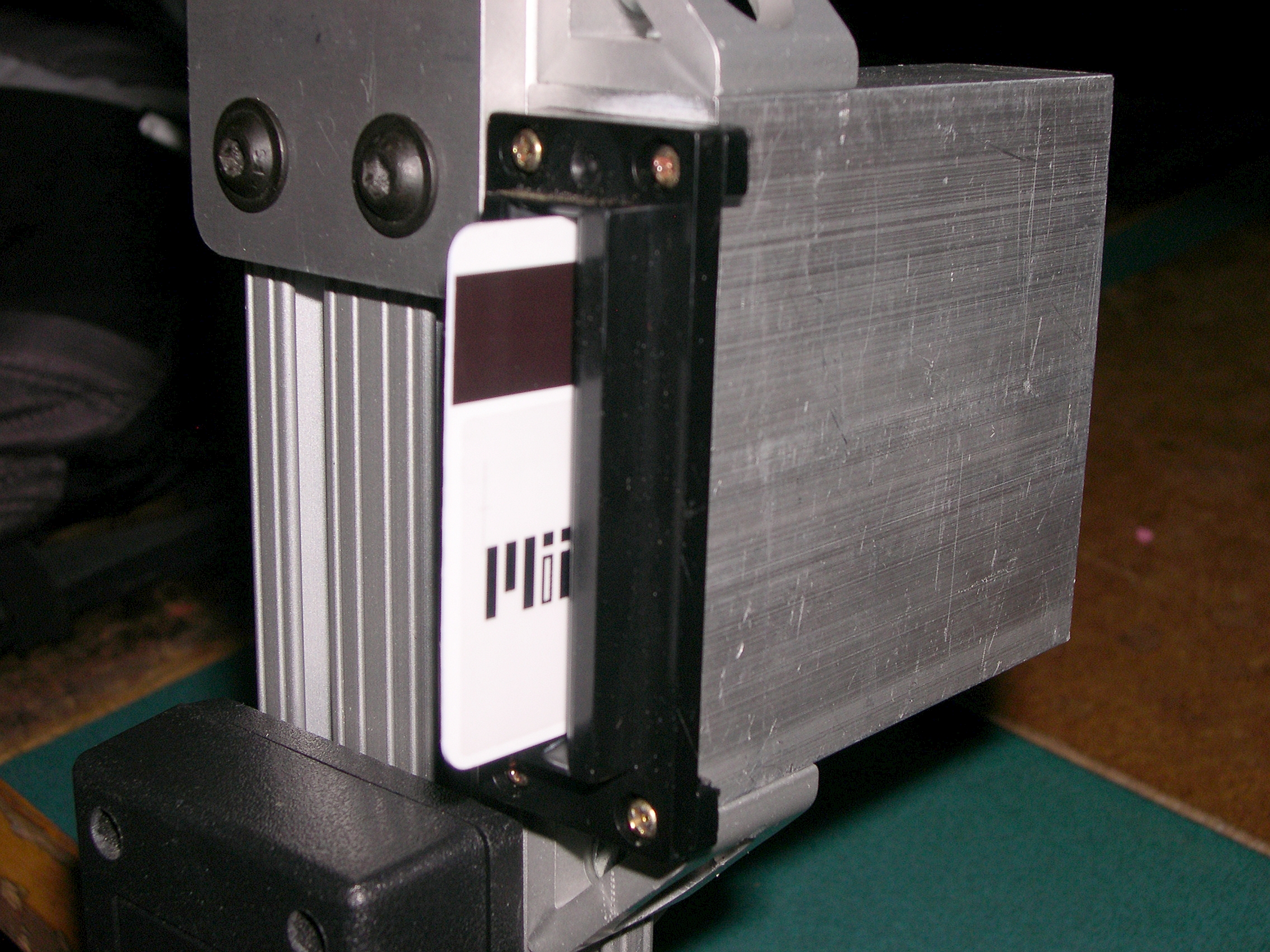
The DIY Segway is controlled by a PIC microcontroller board based on the Machine Science XBoard. It interfaces with a computer for programming the chip or viewing sensor values in real-time. Note that although a laptop is used for debugging, the segway itself is controlled entirely by the microcontroller. Its "deadman's switch" is a magnetic card reader, as pictured below. For sensors, we used an ADXL203EB accelerometer to sense acceleration due to gravity -- which is a good way to measure the angle -- coupled with an ADXRS401 gyroscope to measure the rate of angular rotation (how fast the person is falling forward). The Apple iPhone also uses an accelerometer to determine when you tilt it... but you can't ride an iPhone!
Software
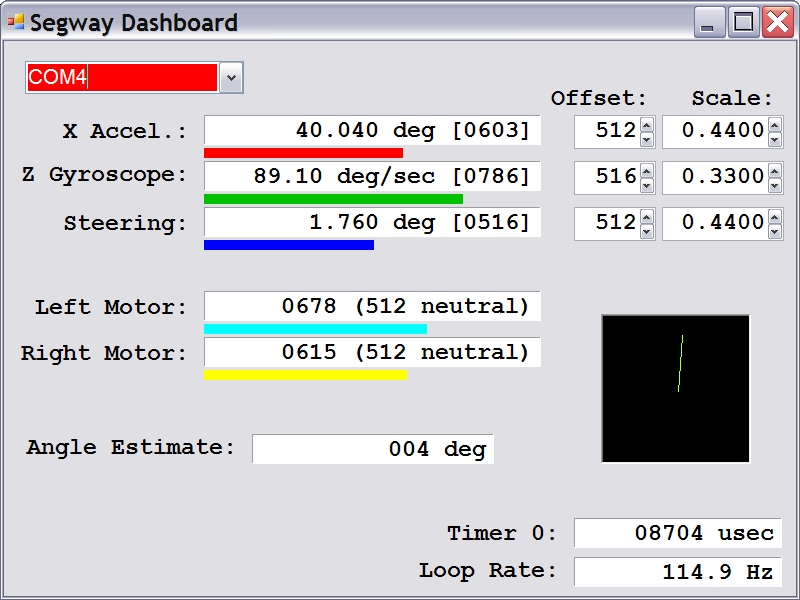
All of the code on-board the DIY Segway was written in C and compiled / loaded with Machine Science's IDE. The heavily commented source code can be viewed nicely in a browser here and downloaded here. If you have any questions about the code or suggestions for improvement, feel free to direct them to this e-mail address. The code's main loop currently runs at about one hundred times per second (100 Hz), which is more than adequate for keeping a person balanced. It also uses the onboard radio to transmit variables to a laptop for real-time debugging, as shown in the screenshot below.
The DIY Segway goes to Swapfest
| DIY Segway | Segway Transporter | |
| Top Speed | Theoretically 11mph | 12.5mph in newer versions |
| Steering Mechanism | Lean steering | Twist handlebar in older segways, lean steering in newer segways |
| Weight | 52lbs w/ battery, 39 w/o | 83lbs w/ battery, ?? w/o |
| Number of Cupholders | 2! | 0 |
To-Do List
The DIY Segway's not finished just yet. We still have a lot to do, including:
- Clean up this website
- Tweak settings
- Perfect the code
- Make a better battery holder
- Thermoform a cover for the bottom
- Code it so that different cards store different settings with the card reader.
- Etcetera...
Miscellaneous
- Technical Documentation - More details on the base, electronics, controller, plus drawings, source code, etc.
- http://www.dena.demon.nl/balansbot.html
- Spoof of an infamous Rockwell Automation Video
{kind=link}
...that's only a few million short of www.tlb.org/scooter.html.
This site is not affiliated with Segway, Inc. (if you couldn't tell). All trademarks are property of their respective owners.
Site design by Cam T.