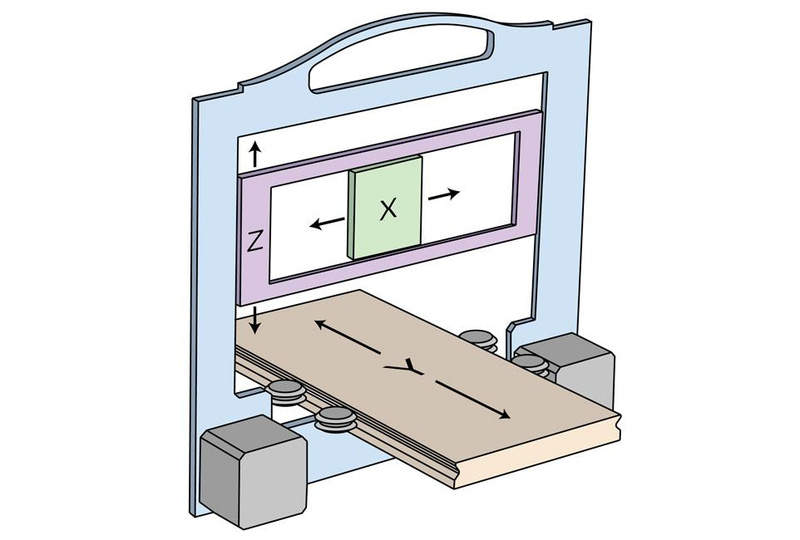
An H-bot for XZ motion, and a rack-and-pinion for Y. This configuration puts the motors in all the right places.