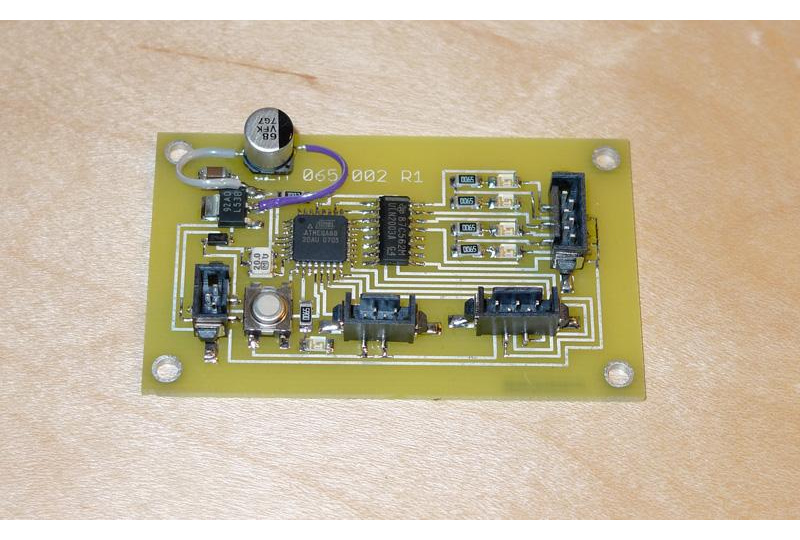
This unipolar stepper driver board was built as a testbed for adapting Prof. Neil Gershenfeld's Internet Zero microcode to allow syncronous control of multiple stepper motors over a network.
This unipolar stepper driver board was built as a testbed for adapting Prof. Neil Gershenfeld's Internet Zero microcode to allow syncronous control of multiple stepper motors over a network.