The Challenge: To build a submarine that would dive, move forward, move backward, and surface.
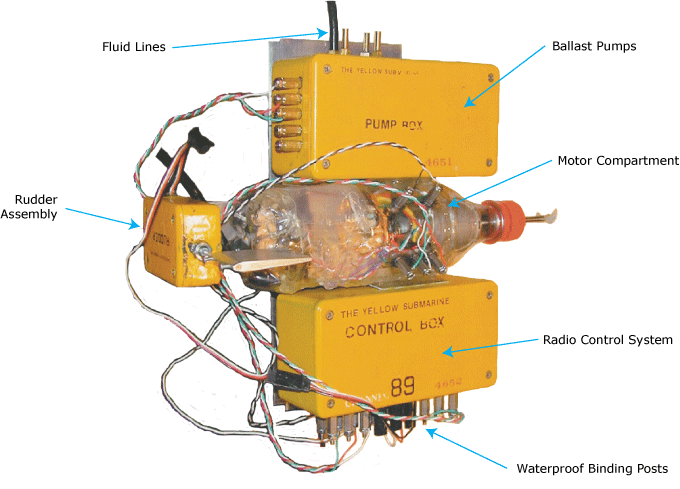
Technical Approach: : I built a radio-controlled submarine which dived and surfaced by pumping water out of a ballast tank, was driven forward and backward by a DC motor, and could steer with a custom-machined aluminum rudder.
Selected Design Features: The submarine was built in a compartmental fashion, which was important in preventing the entire machine from flooding as the result of a single leak. Five separate compartments were used:
 |
 |
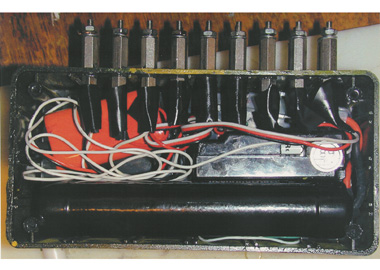
| The control box. | The pump box. |
 |
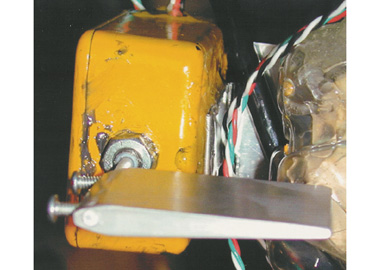 |
| A pencil-box turned ballast-tank. | Up close and personal with the rudder. |