Description
This project is associated with the PPR project at the Distributed Robotics Laboratory at MIT. The goal is to design robots that are produced and designed in an automated fashion out of simple parts that can perform tasks as well as existing robots. To read more about the project please visit ppm.csail.mit.edu/
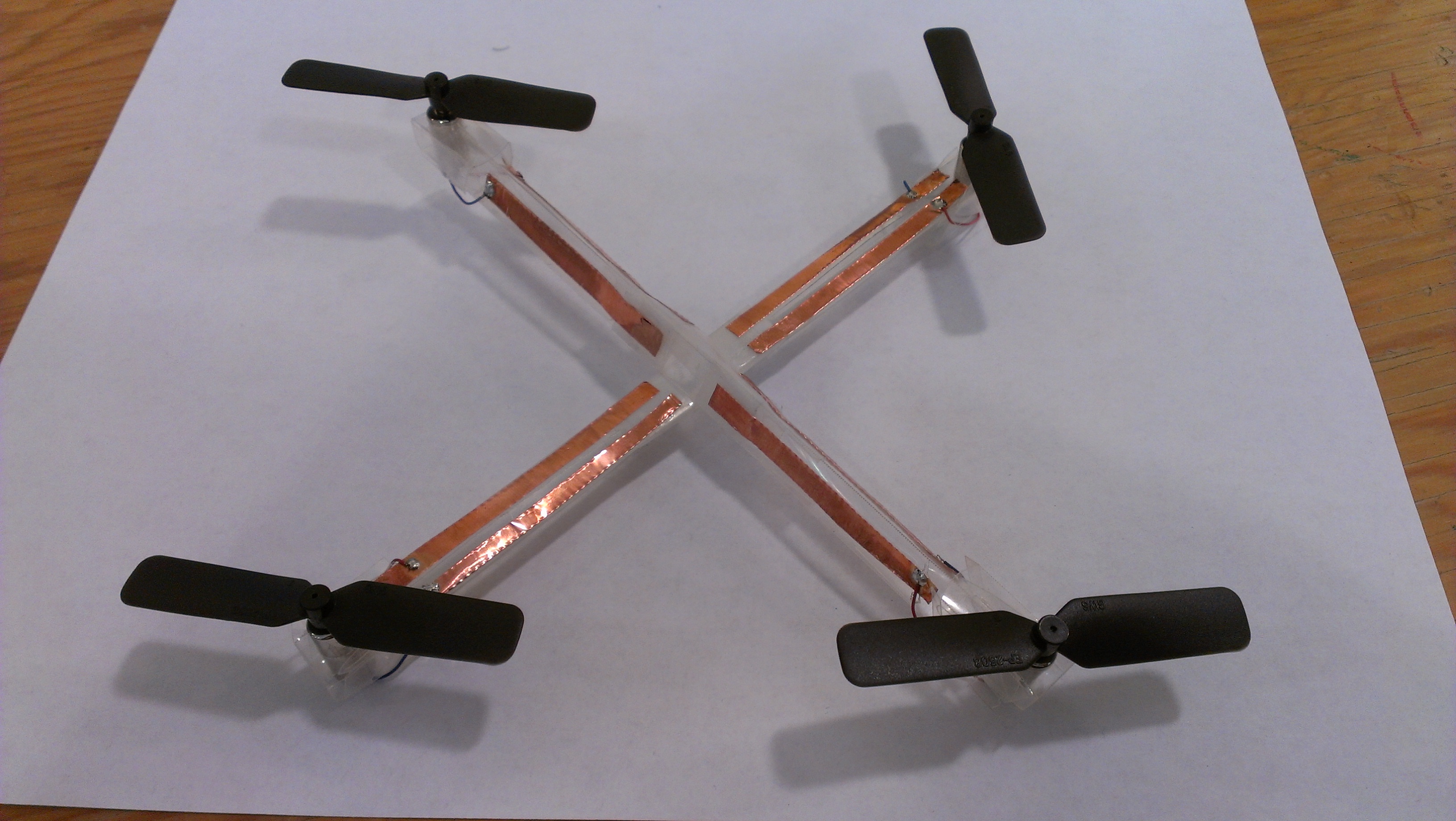
The most recent version of the foldable quadrotor. The frame is made out of 5 thou peek. The frame weights only about 4 grams, while the whole quadrotor excluding the electronics weights 18 grams.
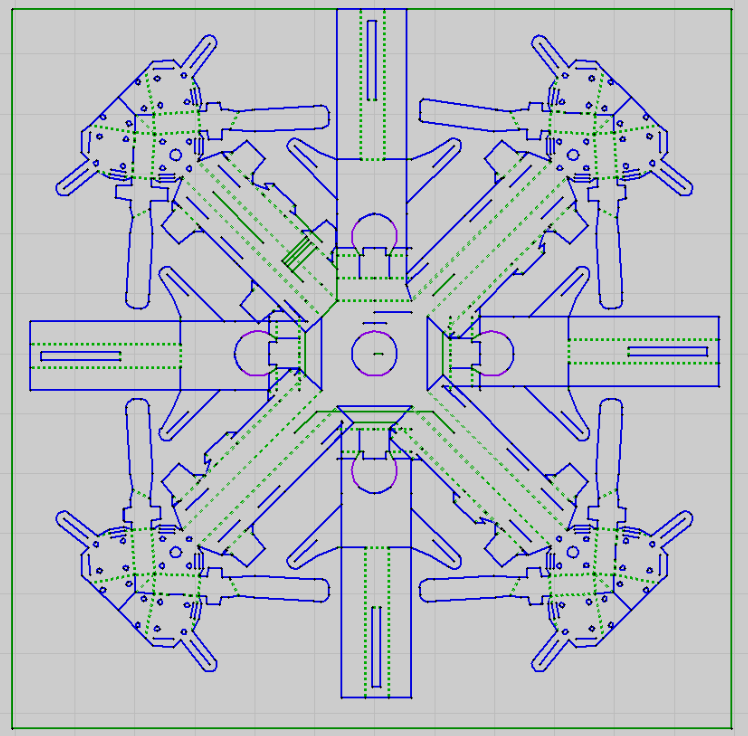
This is the computer manufacturing file that creates the folds and cuts shown in the model below.
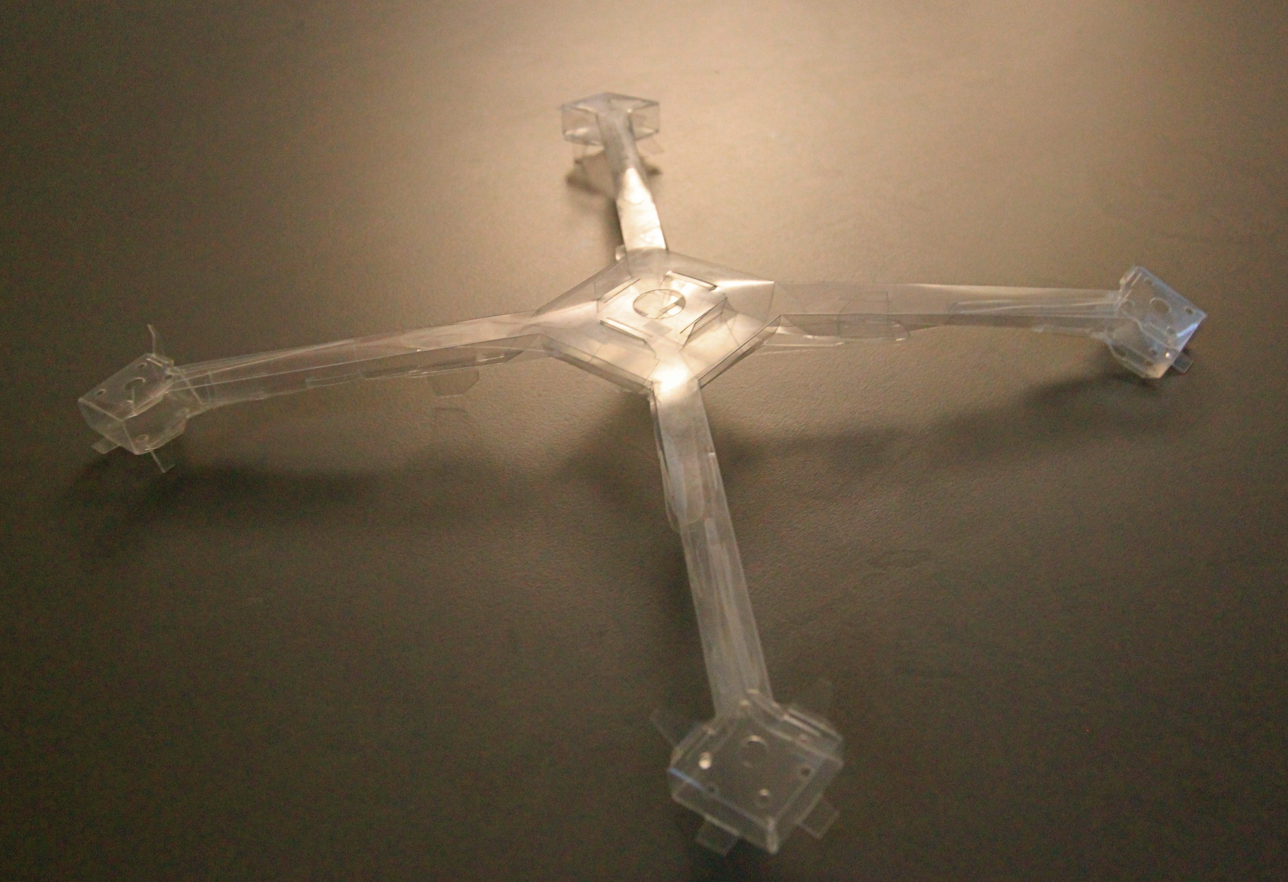
This is an early prototype of a folded quadrotor made out of 5 thou thick polyester and cut on a laser-cutter.
|
Videos and 3D Models General information about the Printable Robot project. Test of one of the propeller on the foldable quad-rotor. |