All past posts
CRISP: Object Pose and Shape Estimation with Test-Time Adaptation
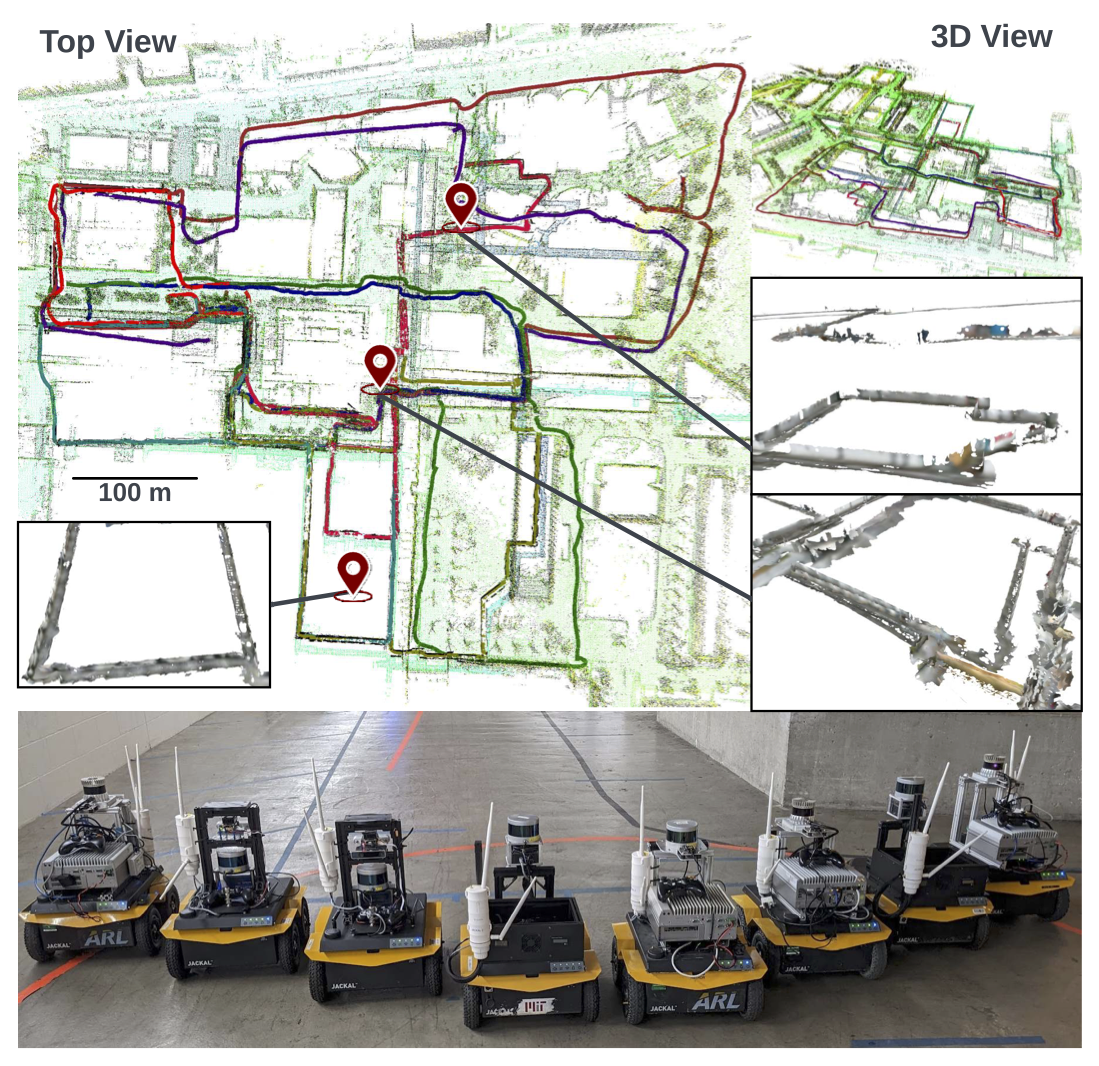
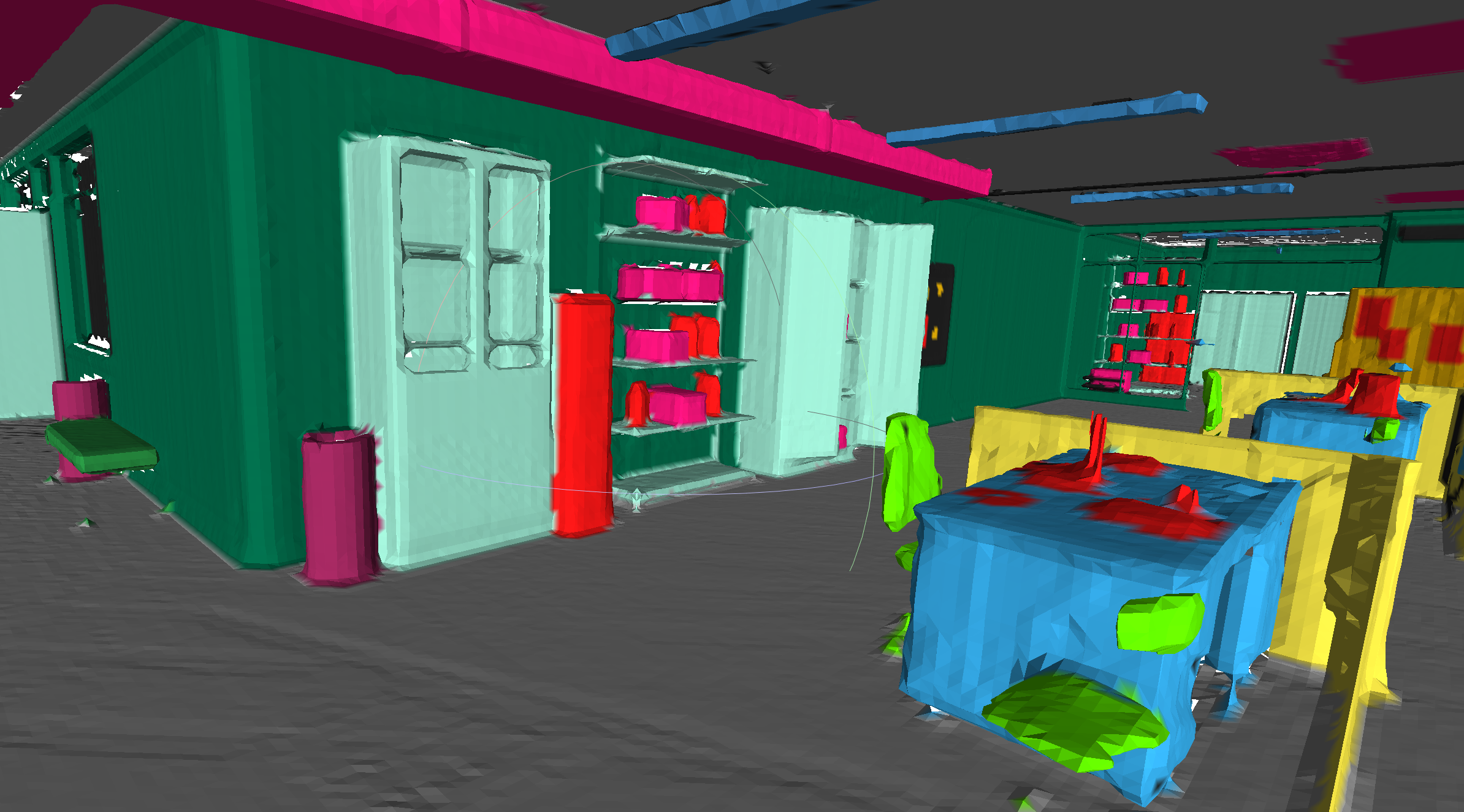
Kimera-Multi: Robust, Distributed, Dense Metric-Semantic SLAM for Multi-Robot Systems
Foundations of Spatial Perception for Robotics: Hierarchical Representations and Real-Time Systems
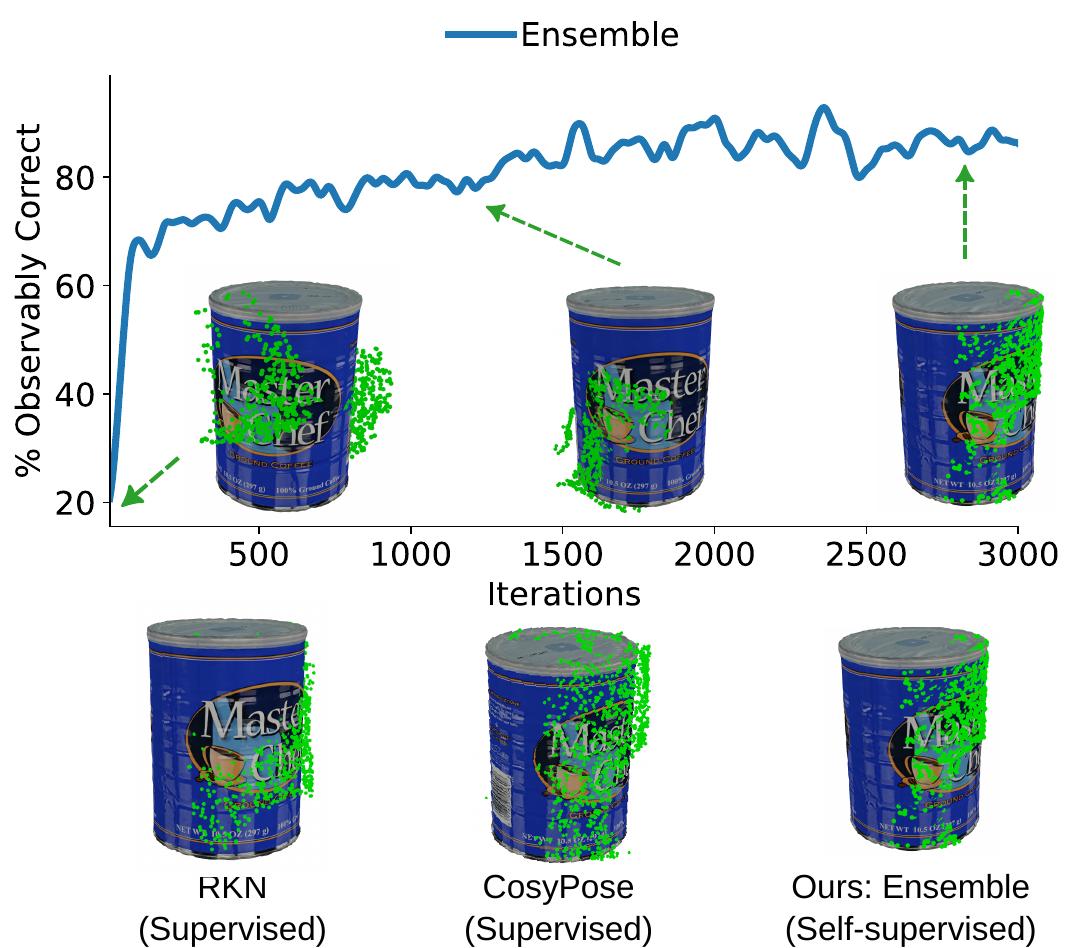
A Correct-and-Certify Approach to Self-Supervise Object Pose Estimators via Ensemble Self-Training
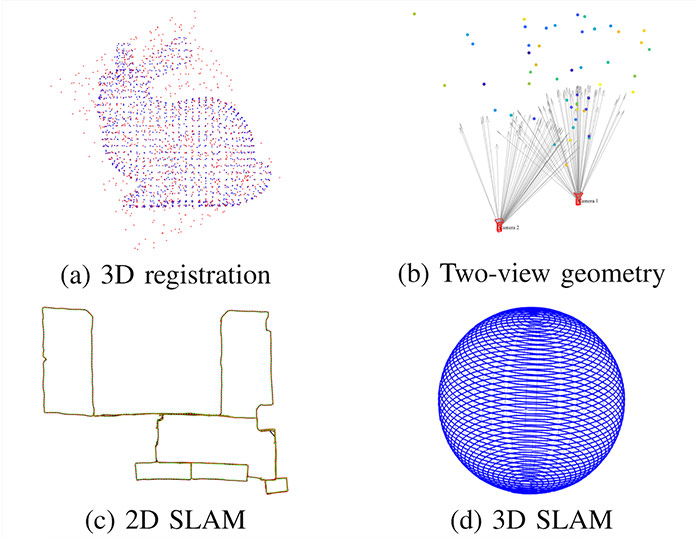
Graduated Non-Convexity for Robust Spatial Perception: From Non-Minimal Solvers to Global Outlier Rejection
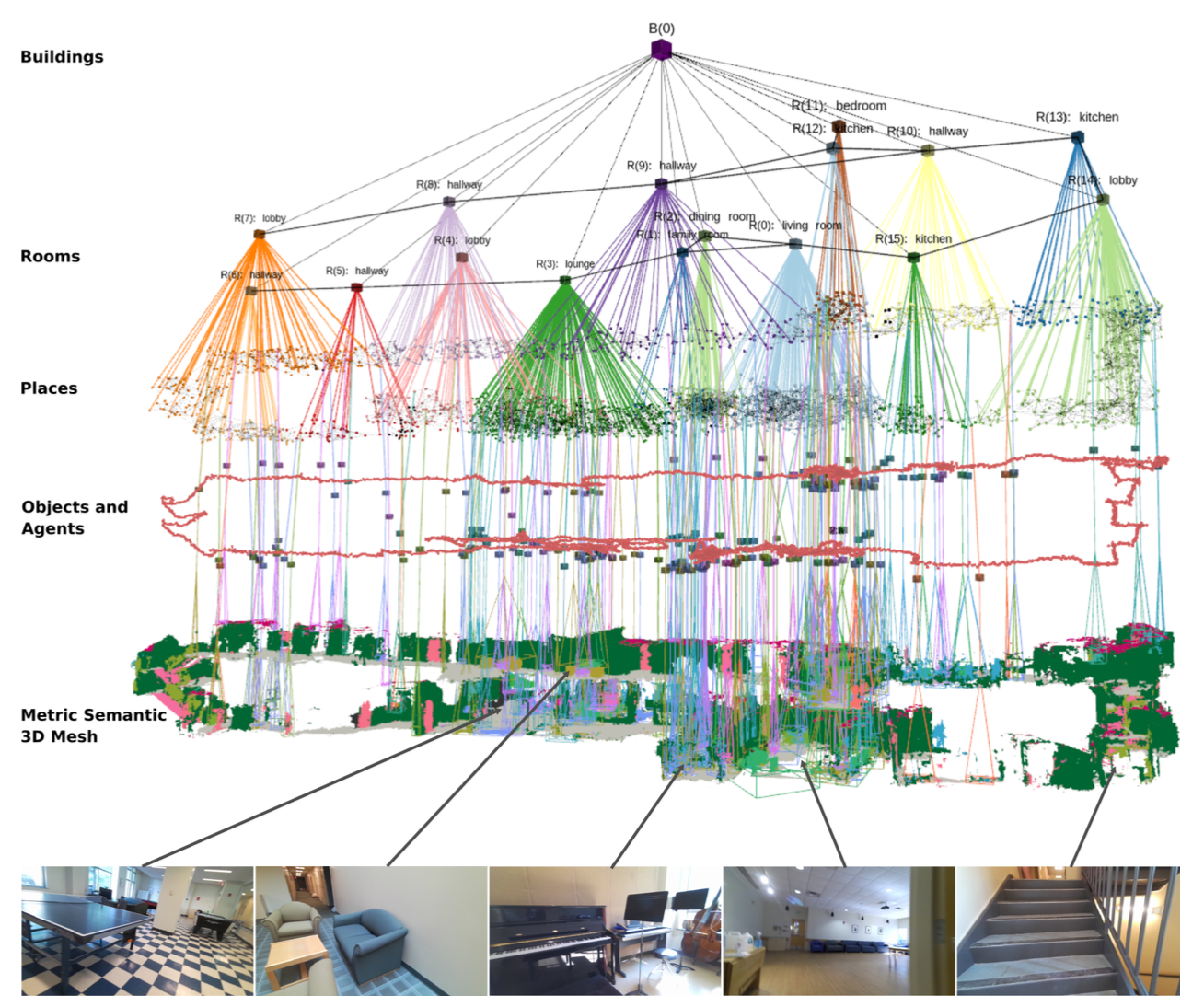
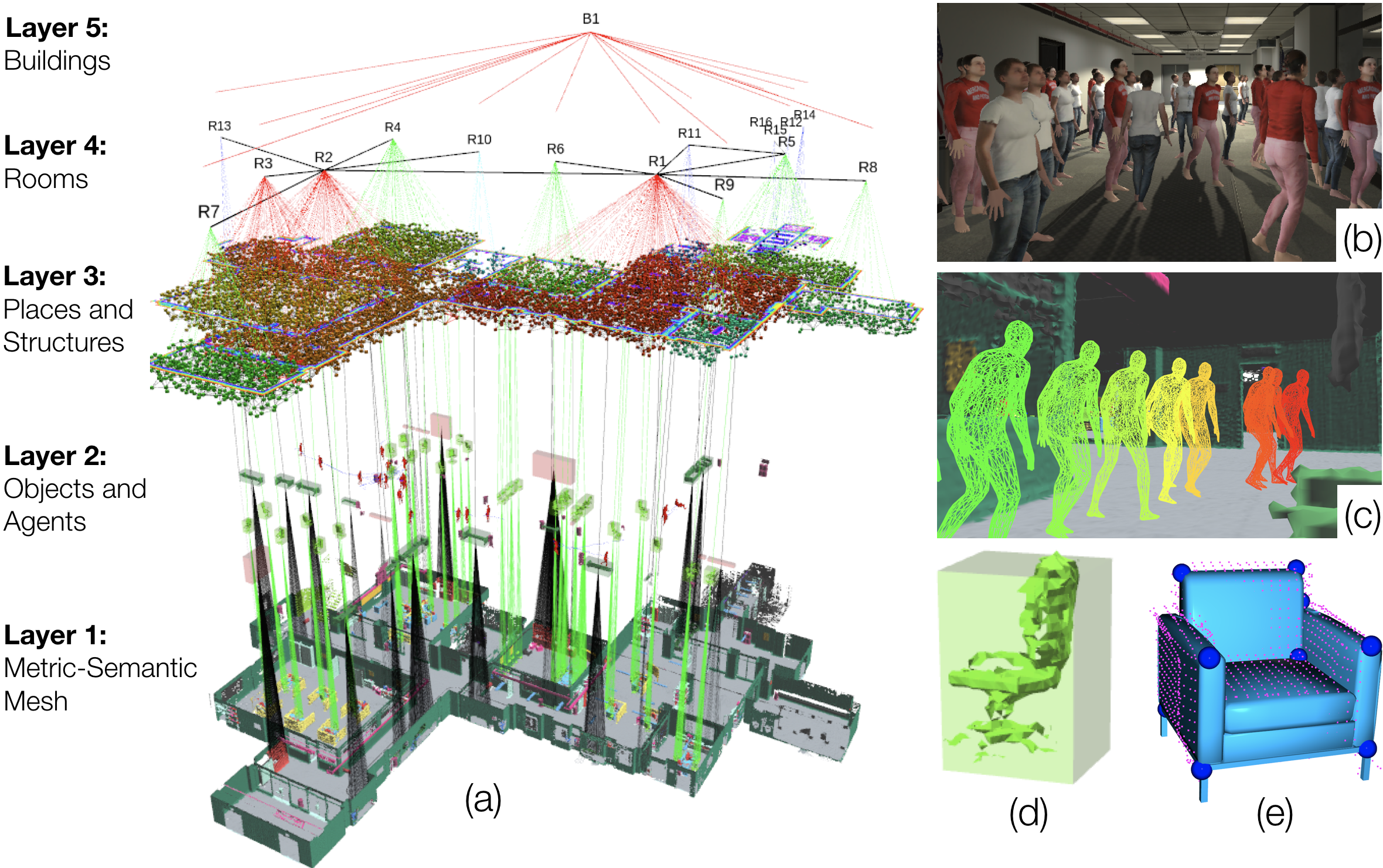
3D Dynamic Scene Graphs: Actionable Spatial Perception with Places, Objects, and Humans
Kimera: an Open-Source Library for Real-Time Metric-Semantic Localization and Mapping
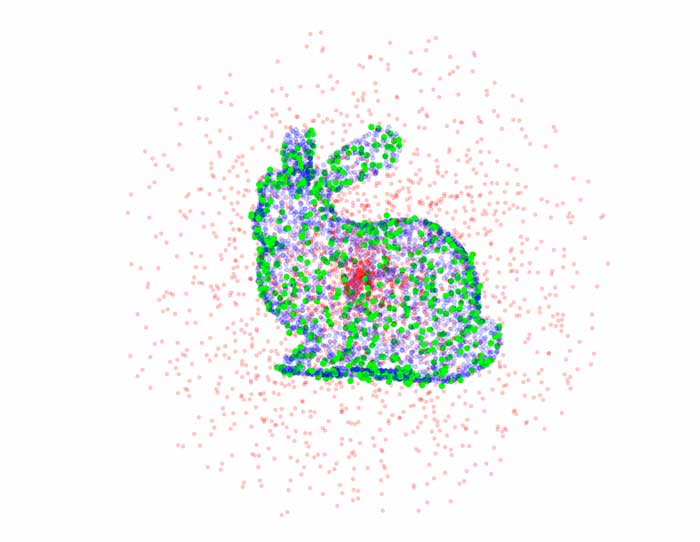
Polynomial-time Robust Registration with Extreme Outlier Rates
Outlier-Robust Spatial Perception
Robust Outliers Rejection