Active Stabilization 3-Axis Sensor Platform |
|||
by Kyle Vogt, Scott Torborg, and Mike Scharfstein |
|||
Abstract |
|||
We will construct a 3-axis stabilization platform will be able to correct for deviations in pitch, yaw, or roll from a preset orientation, which can be changed at any time by a computer using a CAN interface to our platform. The system will use accelerometers, rate gyroscopes, and feedback from motors to sense the actual position of each axis, and then correct for any changes by sending commands to brushless motor amplifiers that will be used to move each axis. In order to help us make accurate and smooth corrections we will also implement a filter for the input from the sensors.
|
|||
Links To Files |
|||
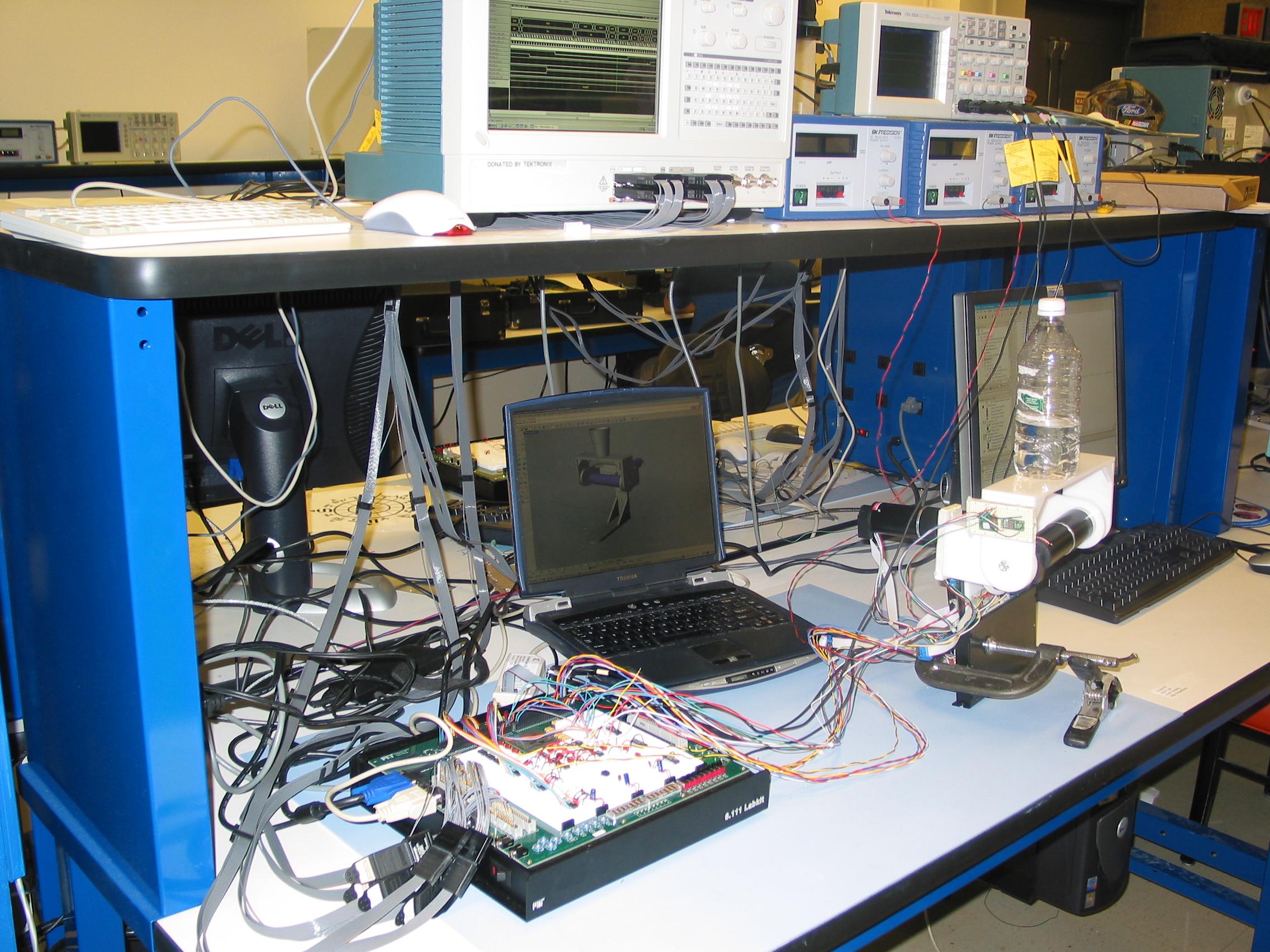
Photos |
|||
 |
 |
 |
 |