Super IO |
|||
by Ross Glashan and James Wnorowski |
|||
Abstract |
|||
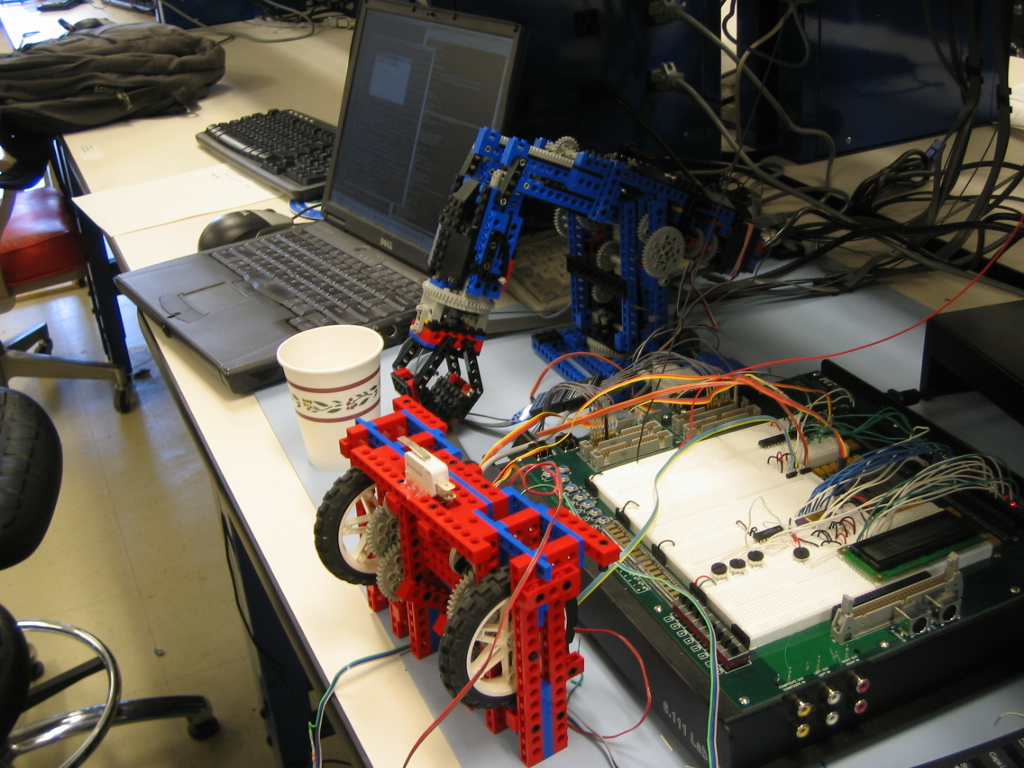
We will be implementing
an IO Controller Chip for a small robot controller board. This chip
will be designed to fit into a small FPGA which will communicate with
a host microcontroller over I2C. The microcontroller will send commands
over I2C to the FPGA which will then interface with a variety of IO
Devices (motors, servos, analog sensors, shaft encoders ...)
|
|||
Links To Files |
|||
Photos |
|||
 |
 |
 |
 |