Robert Brik
Mechanical/Design Engineer
A quick overview of my work and research experience.
Cytrellis Biosystems

Cytrellis Biosystems
- Cytrellis Biosystems is a clinical stage medical device company developing a method to remove excess skin and improve skin cosmesis with a minimally invasive, in-office procedure.
- May 2015 - June 2018
- Cytrellis Website
Pulmonary Device Development
Pulmonary Device Development
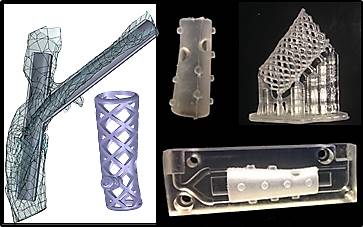
- Collaborated with clinicians at BIDMC (Harvard Medical School, Boston) on the mechanical design and development of various tools and devices to be used in interventional pulmonology, thoracic surgery, gastroenterology, and ENT.
- Designed personalized airway prostheses via 3D modeling based on patient specific airway reconstruction from CT segmentation data.
- Worked on a device for improved diagnostic yield in the peripheral bronchi.
- September 2014 - Spring 2015
- In collaboration with: Clinicians at BIDMC including Dr. Cheng, Dr. Majid, & Dr. Folch
- Resulting Paper: Cheng, Folch, Brik, Gangadharan, Mallur, Wilson, Husta, Majid, Three-dimensional Modeled T-tube Design and Insertion in a Patient With Tracheal Dehiscence, Chest, Vol 148, Issue 4, Oct 2015
iHUB Engineering Council

iHUB Engineering Council
- Worked with the iHUB at Brigham and Women's Hospital to develop the Engineering Council.
- Helped run engineering consultations and device development events, assisted with the initial engineering assessment and evaluation of ideas, and recruited engineers.
- Summer 2014 - Spring 2015
- In collaboration with: The iHUB at Brigham & Women's Hospital iHUB
Helbling Precision Engineering

Helbling Precision Engineering
- Worked on the conception, design, and development of new medical devices, including drug delivery devices and surgical instruments.
- Explored Bluetooth communication systems and integrated them into various medical device benchtop prototypes.
- Analyzed and performed root-cause analysis on a drug infusion device. Then implemented and tested design changes to increase reliability, ease assembly, and decrease cost.
- Conceptualized and helped create portions of an advanced prototype for a laparoscopic surgical tool with unique user interaction requirements.
- August 2013 - August 2014
- Resulting Patents: US 20150367072
MIT Biomimetrics Lab

MIT Biomimetrics Lab
- Designed and prototyped a high force robotic hand for a humanoid robot.
- Created the prototype from a variety of rubbers molded on top of a metal backing with a glass fiber reinforcement.
- The hand was designed to be actuated with superelastic nitinol wire.
- Additionally, worked on the development of a clutch system for an exotendon suit.
- June 2012 - August 2012
Ethicon Endo-Surgery
Ethicon Endo-Surgery
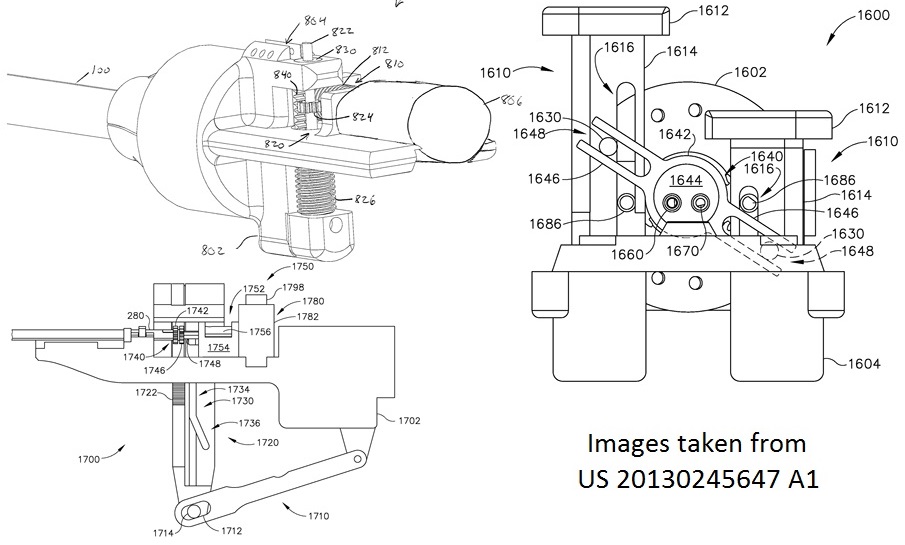
- Worked on designing and prototyping mechanical and motor controlled drive/mechanical control systems for a new laparoscopic suturing instrument.
- Created and prototyped multiple concepts for a mechanism to control and actuate the device.
- Developed a motor powered alternative that was potentially simpler and required less force to operate.
- Performed testing and analysis on Ligamax devices.
- Learned the mechanics and functionality of various endoscopic surgical devices produced at Ethicon Endo-Surgery.
- June 2011 - August 2011
- Resulting Patents: US20130245648, US20130245647
Jauvtis MicroPrecision (Switzerland)

Jauvtis MicroPrecision (Switzerland)
- Worked on the design and development of a mini surgical robot for use with laparoscopic surgery.
- Upon being given a basic concept of the device, I created a full 3-D CAD model of the assembly and the associated 2-D drawings necessary to fabricate the individual components.
- Traveled to Niguarda Hospital in Milan to investigate the conditions under which the robot would operate.
- Guest at a conference on laparoscopic surgery at AIMS Academy.
- Viewed a 7 hour surgery that began as a laparoscopic procedure and switched to an open stomach operation.
- Conducted patent searches and helped compose the documentation required to apply for the provisional patent.
- Additionally, I worked on two other surgical devices at JMP.
- June 2010 - August 2010
MIT Media Lab - New Media Medicine
MIT Media Lab - New Media Medicine
- Worked on developing a smart pill dispenser to enhance doctor patient communication and interaction. The pill dispenser interacted with the communication system developed by John Moore to help track patient compliance and allow the doctor to remotely adjust a patient's prescriptions. The design was supposed to be simple and provide a soft reminder to the patient.
- My second project was assisting in the development of a ceiling mounted arm to hold monitors in a doctor's office. The arm was designed to be cost effective and was later mounted in a research facility.
- June 2009 - May 2010
Virginia Science Museum
Virginia Science Museum
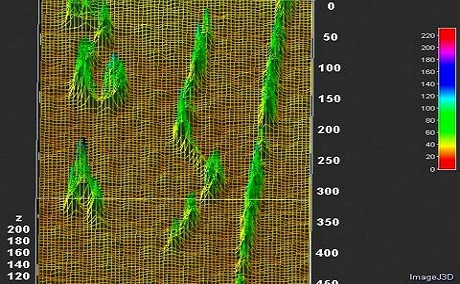
- Investigated Cloud Chamber particles through the use of computer based image analysis tools.
- Developed methods for harnessing image analysis software to characterize, identify, and quantify particles.
- As a result of my work, I presented "Quantitative Analysis of Background Radiation Particle Tracks in a Large Diffusion Cloud Chamber Using 'ImageJ' Digital Imaging Techniques" R. Brik(MIT), D.B. Hagan(Science Museum of Virginia) (2009) at the 2009 Virginia Academy of Science Annual Meeting.
- June 2008 - August 2008
VCU Mechatronics Lab
VCU Mechatronics Lab
- Worked at various times throughout the year on my research projects.
- Developed Ion Polymer Metal Composites (IPMCs) for use in actuation and sensing.
- Built a line following robot to experiment with a new microcontroller.
- Presented my work with IPMCs at the 2008 International Science & Engineering Fair and won 3rd place in Materials Science & Bioengineering.
- June 2006 - March 2008
Northrop Grumman

Northrop Grumman
- Developed wiring diagrams, installed servers, and provided general assistance with the transition of the Northrop Grumman/VITA Data Center from Richmond to the new Chester location.
- June 2007 - August 2007
An overview of my past projects and activities.
Improving Fine Needle Aspirations
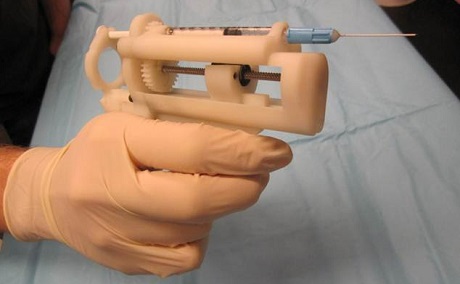
Improving Fine Needle Aspirations
Created a safe and cost effective fine needle aspiration device for thyroid biopsies in order to improve diagnostic success rates and minimize the number of unnecessary surgeries. More Info
- MIT: 2.750 - Precision Machine Design
- Year: Fall 2011 - Spring 2012
- Teammates: Alex Lesman, Kevin Chen, Alex Speltz, Jisoo Kim
- In collaboration with: Dr. Parangi and Dr. Faquin at MGH
- Resulting Patents: WO 2013110079A1
Autonomous Rooftop Shingling Robot

Autonomous Rooftop Shingling Robot
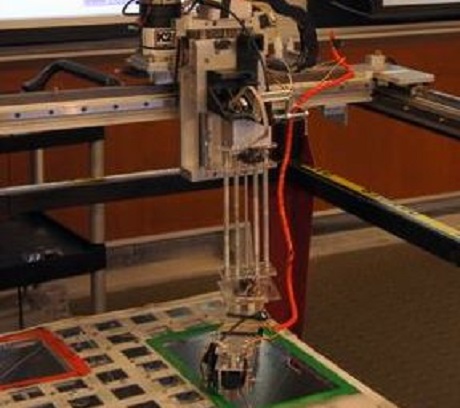
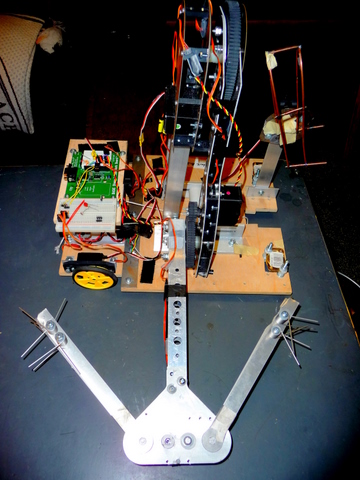
The robot was designed to autonomously pick and place shingles on a mock rooftop. It used a biased four bar linkage system with a pneumatic suction system to move the shingles and six wheel drive base to navigate around the rooftop. More Info
- CMU: Mechatronics
- Year: Spring 2013
- Teammates: Chiedozie Okafor, Hang Chui, Kory Stiger
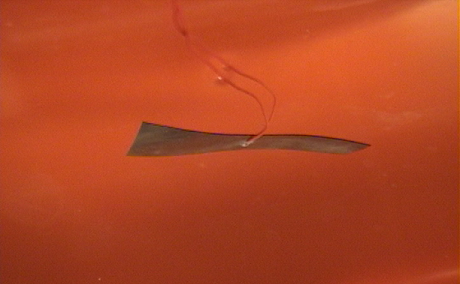
Soft Pneumatic Gripper with Synthetic Fibrillar Adhesive
Soft Pneumatic Gripper with Synthetic Fibrillar Adhesive
Combined principles from the Suzumori and Pneu-net actuator to create fingers that flex and grip. Additionally, attached fibrillar adhesive pads to the fingers to increase grip and manipulation. More Info
- CMU: Soft Robotics
- Year: Spring 2013
- Teammates: Robert Giglio, Meghan Downie, Sukho Song
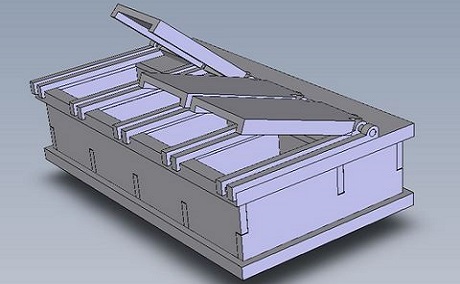
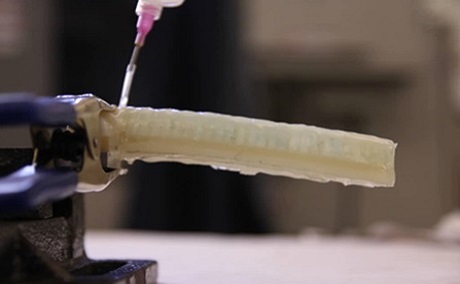
Clog Resistant Nasogastric Tube and Modular In-Line Flusher
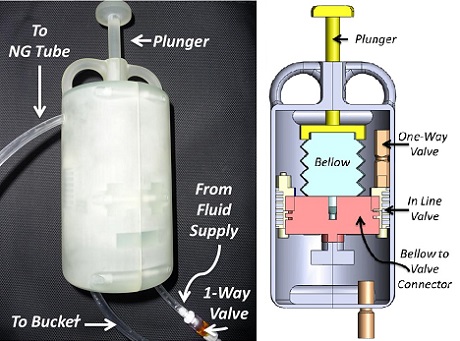
Clog Resistant Nasogastric Tube and Modular In-Line Flusher
Nasogastric tubes are commonly used to evacuate the stomach during cases of small obstructive bowel syndrome and surgical operations, unfortunately the tube tip and bore is prone to clogging. A redesigned tube tip featuring helical slits, rather than holes, reduces clogging by both food particles and suction against the stomach mucosa. Should a clog still occur an in-line flusher has been developed that, with a single squeeze, can disconnect the vacuum, deliver a saline purge and reconnect the vacuum. Reduced clogging and easier flushing will improve patient comfort and reduce nursing staff workload. More Info
- MIT: 2.752 - Development of Mechanical Products
- Year: Spring 2011
- Teammates: Robert Michaels, Jose Conseco
- In collaboration with: Dr. Tavakkoli at BWH
- Resulting Patents: US 20140100531
Reactor Rage: Autonomous Response Robot
Reactor Rage: Autonomous Response Robot
As team captain, led the Reactor Rage team in creating a robot to reach into a mock building, cool down a reactor, turn off associated piping, and move debris. More Info
- MIT: 2.12 - Intro to Robotics
- Year: Fall 2011
- Teammates: Wes McDougal, Ron Wilcox, Deniz Sevinc, & Becky Vasquez
Toy Design - Serenade

Toy Design - Serenade
Created Serenade, a robotic flower that acts as a guitar tuner. The flower bends from left to right based on how sharp or flat the tone is and bends forward while blooming if the sound being played is in tune.
- MIT: 2.00b - Intro to Toy Design
- Year: Spring 2009
- Teammates: Michaela Lavan, Josh Gordonson, Robert McQueen, Hannah Rice
Robotics Competition - Aztech Challenge
Robotics Competition - Aztech Challenge
The robot was designed to move booklets to the top of a pyramid and then pull down a heavy lever. An arm, consisting of a tower with two moving segments and a scissor gripper at the end, was designed to quickly grab and move the booklets. Meanwhile, the lever puller lowered a large metal frame over the lever; a lasso then grabbed onto the lever and pulled it down for a large bonus multiplier. More Info
- MIT: 2.007 - Design and Manufacturing I
- Year: Spring 2010
Kinematic Coffee Cup Holder

Kinematic Coffee Cup Holder
The coffee cup holder is used to display exact kinematic constraints. A hemisphere under each cup creates a three-groove kinematic coupling that forces the top plate into the same position every time it is placed on the base. More Info
- MIT: 2.75 - Precision Machine Design
- Year: Fall 2011
Reactor Rage: Autonomous Response Robot

Cakebot
The robot is designed to hold a cake and battle other cake wielding robots on the Food Network Challenge.
In the three weeks of design and development, the team focused on robustness and the ability to plow through other robots and cakes. Acting as Jorg Amsler's cake, the robot quickly destroyed the other robots on the Food Network Challenge to win the challenge.
- Year: Fall 2010
- Teammates: Alex Lesman, Alexis Hakimi
- In collaboration with: Jorg Amsler
FIRST Robotics

FIRST Robotics
Competed in four FIRST competitions with Mills E. Godwin High School Robotics Team 540. I was president my senior year and engineering design lead for my junior and senior years.
The four robots:
Talon - racing robot with a massive claw to grab a ball and launch it over a bar
Triton - mecanum drive robot to hang tubes on a center rack
Pandora - pushing powerhouse with a baseball style ball shooter
CHOMP - scissor lift robot that was converted to expand for defensive play
- Year: 2004-2008
Vexplorer

Vexplorer
The Vexplorer robot, which competed in the Grant Imahara VEXPlorer Robot Challenge, had a scissor grip with large rollers that pushed items into the claw and expanded the types of items the robot could pick up. Additionally, it featured a camera that could rotate 270 degrees.
Video of the entry can be found here (thanks to Andrew Burks for help with the video).
- Year: Spring 2008
Welcome!
My interests span robotics and medical devices and I can often be found attempting to merge the two. This has led me to DePuy Synthes, where we're working on collaborative orthopedic robots to help surgeons.
After graduating from MIT with a Bachelor's in Mechanical Engineering and a Master's from Carnegie Mellon, I worked on a variety of projects ranging from laparosopcoic surgical tools to pulmonology devices. Some of my most interesting results came from applying techniques common in robotics to the medical field. You can see some of my projects throughout the website and please feel free to contact me with any questions or just to chat about interesting projects.
