Background
"Modular self-reconfigurable robotics" or sometimes "programmable matter" refers to the sub-field of robotics that involves swarms of interacting modular robots. Researchers theorize that in the future these robots will be able to morph into different objects on demand, much like the T-1000 liquid-metal in the movie Terminator. While thankfully nothing even remotely approaching the T-1000 has been designed yet, work is progressing, although there are many significant unsolved research challenges. The ability to reconfigure will not only allow for more efficient reuse robotic modules - it will also open up amazing possibilities that are just now being imagined. One possible approach is to make mechanical systems much more like biology - where they can reshape themselves on demand and grow and change in a similar manner to living matter. If this work seems interesting - many academic papers describing progress in this field can be found online - a good place to start is with the following paper (Can be found online) Modular Self Reconfigurable Robotic Systems: Challenges and Opportunities for the Future Yim, Rus, Moll, Lipson, et. al.
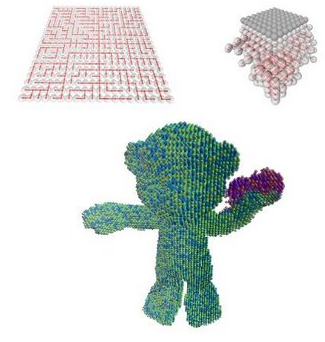
This pictures shows conceptually how small robots might form other objects - in some ways analogous to how cells form organisms in biology. Source: http://nextbigfuture.com/2008_10_26_archive.html
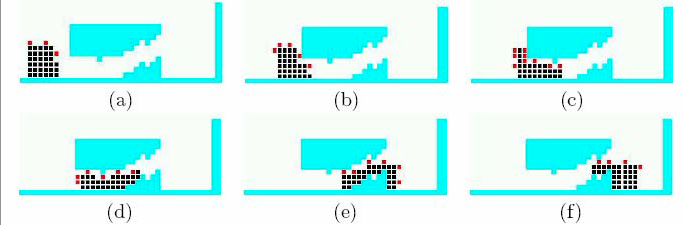
Image showing how cube shaped robots might reconfigure in order to fit through a small obstacle. Source - Unknown
|
Videos Since most of the work in this area is very difficult to describe, videos are perhaps the best way to get a sense of what is going on. The following three links do not support embedding - but they show various different projects in the field.
Simulation of small robots making 747
Demonstrating aspects of the Claytronics project at CMU Showing the work on Modular Disassembly at MIT Csail |