Kevin Doherty

I’m a robotics researcher at Boston Dynamics where I work on perception and state estimation for the Atlas humanoid robot.
Previously, I completed my PhD at the Massachusetts Institute of Technology in the AeroAstro department, as part of the MIT/WHOI Joint Program. At MIT, I was a member of the Marine Robotics Group in the Computer Science and Artificial Intelligence Lab (CSAIL), where I was advised by John Leonard.
My research interests are at the intersection of machine learning and autonomous robotic navigation. I’m particularly interested in the algorithms and representations necessary to endow real robots with the ability to operate robustly over extended time horizons without human intervention, supported by active, lifelong learning. My PhD work was supported in part by an NSF Graduate Research Fellowship.
Before my PhD, I was an undergraduate student at Stevens Institute of Technology where I did research on robot mapping in the Robust Field Autonomy Lab under Brendan Englot.
News
| Oct 12, 2022 | I will be chair of the Marine Robotics 2 session at IROS this year! |
|---|---|
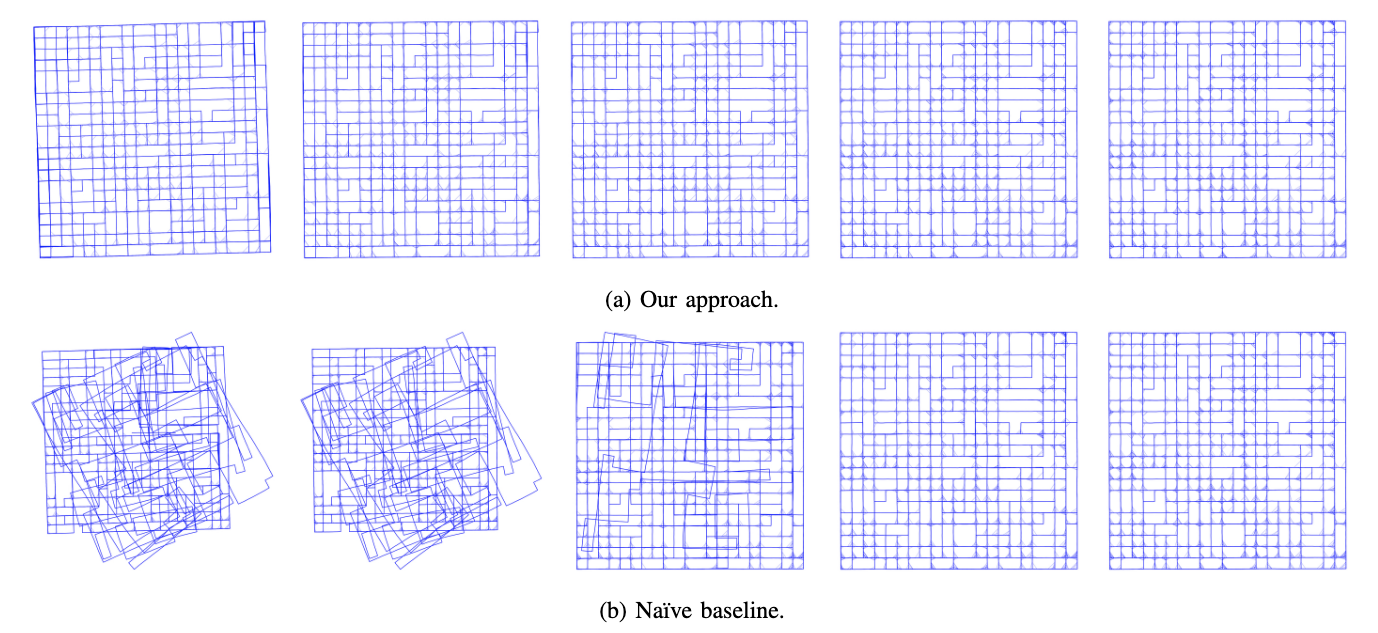
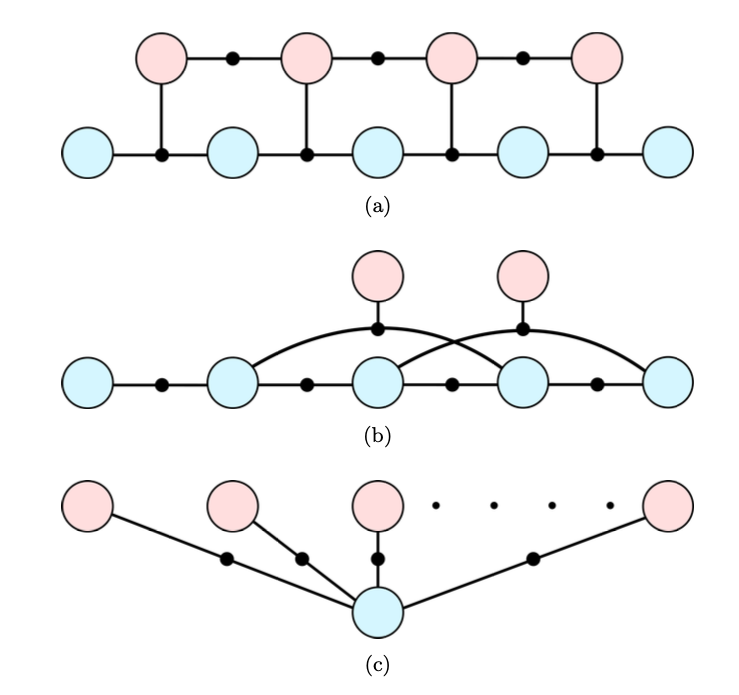
| Aug 5, 2022 | Two papers accepted to IROS 2022 on spectral measurement sparsification for pose-graph SLAM and SLAM-supported self-training for 6D object pose estimation. |
| Jul 15, 2022 |
This past May, I presented our work on Discrete-Continuous Smoothing and Mapping at the ICRA 2022 Workshop on Robotic Perception and Mapping. A video of my talk is now available on YouTube below. Special thanks to Kaveh Fathian and all the other organizers for putting together a wonderful workshop.
|
| Jun 3, 2022 | I have been selected as part of the RSS Pioneers 2022 cohort! |
| Jan 31, 2022 | Our work on performance guarantees for spectral initialization in rotation averaging and pose-graph SLAM has been accepted to ICRA 2022. |