Deep Learning
Overview: We have developed algorithms for neural architecture search and for training neural networks with limited labeled data. Together, these methods aim to reduce the need for human expertise and labor when designing deep learning systems.
Neural Architecture Search with Reinforcement Learning
Paper Code
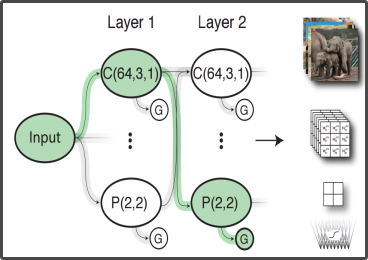
At present, designing convolutional neural network (CNN) architectures requires both human expertise and labor. We developed a reinforcement learning agent to automatically generate high-performing CNN architectures for a given learning task. On image classification benchmarks, the agent-designed networks (consisting of only convolution, pooling, and fully-connected layers) beat human-designed networks created from the same layer types.
Designing Neural Network Architectures using Reinforcement Learning
Baker, Gupta, Naik, and Raskar
International Conference on Learning Representations (ICLR) 2017
Accelerating Neural Architecture Search using Performance Prediction
Paper Data
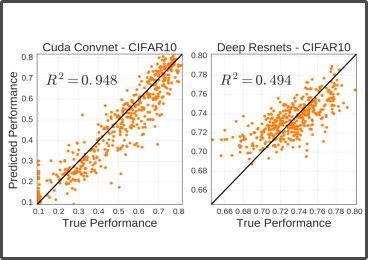
Hyperparameter optimization and metamodeling methods are computationally expensive due to the need to train a large number of neural network configurations. We obtain significant speedups for these methods with an early-stopping strategy based on prediction of final validation accuracy of partially trained neural network configurations using a frequentist regression model trained with features based on time-series validation accuracies, architecture, and hyperparameters.
Accelerating Neural Architecture Search using Performance Prediction
Baker*, Gupta*, Raskar, and Naik
International Conference on Learning Representations (ICLR) Workshops 2018
Also presented at the Neural Information Processing Systems (NIPS) Workshop on Meta-Learning 2017
Learning with Limited Labeled Data
Paper Code
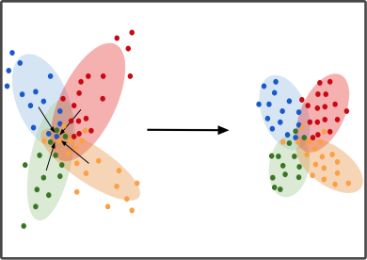
We propose two additional loss terms for end-to-end neural network training for Fine-grained visual classification (FGVC) tasks: (a) a loss term that tries to maximize the entropy of the output probability distributions, (b) a loss term that tries to minimize the Euclidean Distance between output probability distributions. These methods obtains state-of-the-art performance on all six major fine-grained classification datasets and also demonstrate improved localization ability.
Improving Fine-Grained Visual Classification using Pairwise Confusion
Dubey, Gupta, Guo, Farrell, Raskar, and Naik
European Conference on Computer Vision 2018
Maximum-Entropy Fine Grained Classification
Dubey, Gupta, Raskar, and Naik
Neural Information Processing Systems (NIPS) 2018
Machine Learning for Social Good
Overview: We have developed computer vision algorithms that harness Street View imagery to evaluate perceptual preferences for street scenes for people across the globe, along with measurements of populations and the economy at street-level resolution and global scale.

Streetchange: Measuring Physical Urban Change at Scale
Website Paper
Streetchange is a computer vision algorithm that calculates a metric for change in built infrastructure of a street block using two images of the same location captured several years apart. Streetchange is based on semantic segmentation and a machine learning model that predicts human perceptual preferences for street scenes. Streetchange data for 1.5 million street blocks from 5 US cities showed that a dense, highly-educated population was the most important predictor of urban growth.
We used Streetchange to create an interactive visualization which has been visited by thousands of users till date.
Computer Vision Uncovers Predictors of Physical Urban Change
Naik, Kominers, Raskar, Glaeser, Hidalgo
Proceedings of the National Academy of Sciences (PNAS) 2017
Do People Shape Cities, or Do Cities Shape People?
Naik, Kominers, Raskar, Glaeser, and Hidalgo
National Bureau of Economics Research (NBER) Working Paper 2015
Media Mentions: Citylab, Fast Company, Forbes, Harvard Gazette, HBS Working Knowledge/Quartz, MIT News, New York Times, Yahoo! News.
Quantifying Global Urban Perception with Deep Learning
Paper Code Data
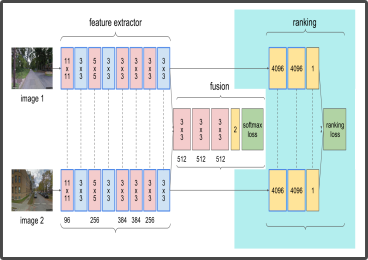
We extended Streetscore with an efficient neural network-based method that is capable of computing several perceptual attributes of the built environment from hundreds of cities from all six inhabited continents. Our method is based on a Siamese-like convolutional neural architecture, which learns from a joint classification and ranking loss, to predict human judgments of pairwise image comparisons.
Deep Learning the City: Quantifying Urban Perception At A Global
Scale
Dubey, Naik, Parikh, Raskar, and Hidalgo
European Conference on Computer Vision 2016
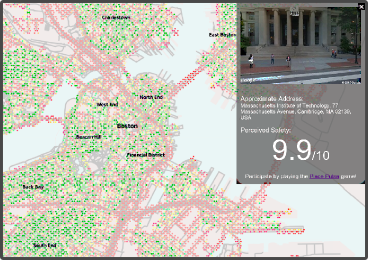
Streetscore – Quantifying Urban Appearance
Website Paper Talk Blog Post
Streetscore is a computer vision algorithm that predicts how safe the image of a street looks to a human observer. We used Streetscore to generate the largest dataset of urban perception
to date covering more than 1 million street blocks from 21 American cities. Social scientists have used Streetscore to study the relationship between visual appearance of cities and mobility, migration, social cohesion, health outcomes, urban upkeep, and zoning policies
We used Streetscore to create an interactive visualization which has been visited by thousands of users till date.
Streetscore – Predicting the Perceived Safety of One Million Streetscapes
Naik, Philipoom, Raskar, and Hidalgo
IEEE Computer Vision & Pattern Recognition Workshops 2014
Cities Are Physical Too: Using Computer Vision to Measure the Quality and Impact of Urban Appearance
Naik, Raskar, and Hidalgo
American Economic Review: Papers & Proceedings 2016
Are Safer Looking Neighborhoods More Lively?: A Multimodal Investigation into Urban Life
De Nadai, Vieriu, Zen, Dragicevic, Naik, Caraviello, Hidalgo, Sebe, and Lepri
ACM Multimedia Conference 2016
Media Mentions: Atlantic Citylab, Daily Mail, The Economist, Fast Company, MIT News, New Scientist.

Predicting Household Income from Street-level Imagery
Paper
We developed a computer vision model to predict the median household income at block group level from Street View images in New York and Boston. We are now extending this work to developing countries, where high quality data on socioeconomic characteristics is often unavailable. This work is a part of a journal article that discusses the promises and limitations of new digital sources of data for studying cities.
Big Data and Big Cities: The Promises and Limitations of Improved Measures of Urban Life
Glaeser, Kominers, Luca, and Naik
Economic Inquiry 2017
Media Mentions: The Atlantic, Chicago Policy Review, Forbes/HBS Working Knowledge.
Time-of-flight and 3D Imaging
Overview: Time-of-flight (TOF) cameras enable three-dimentional imaging and the study of interaction of light and the physical environment. I have utilized continuous-wave TOF imaging (e.g., Microsoft Kinect v2) and Ultrafast TOF imaging (e.g., streak cameras) to develop methods for multipath interference correction, reflectance capture, and imaging through scattering media, among other applications. For a summary of this work, see the invited paper at SPIE Defense+Security 2016.
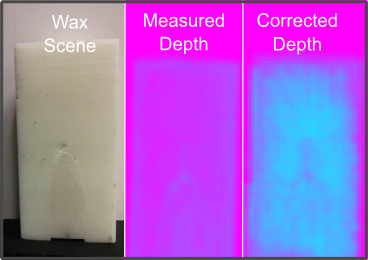
Multipath Interference Correction in TOF Cameras
Paper Supplement
This was my internship project at Microsoft Research with
Sing Bing Kang. We proposed a method to correct for
multipath interference in TOF cameras
using a closed-form solution enabled by the separation of direct and
global components of light transport. We implemented this method
using a Microsoft Kinect v2 sensor and an infrared projector.
A Light Transport Model for Mitigating Multipath Interference in Time-of-flight Sensors
Naik, Kadambi, Rhemann, Izadi, Raskar, and Kang
IEEE Computer Vision & Pattern Recognition 2015
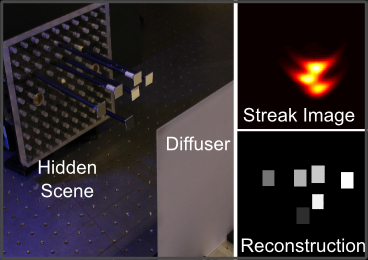
Imaging Through Diffuser
Paper
We proposed a method to estimate the reflectance of a scene hidden
behind a diffuser by analyzing the backscattered light with an ultrafast TOF camera.
Unlike coherence based methods, our method—which utilizes optimization techniques—is
suitable for imaging large objects. This work has potential applications in imaging
through biological tissue.
Estimating Wide-angle, Spatially Varying Reflectance using Time-resolved Inversion of Backscattered Light
Naik, Barsi, Velten, and Raskar
Journal of the Optical Society of America A 2014
Selected by Editors to appear in a Special Issue of Virtual Journal of Biomedical Optics.
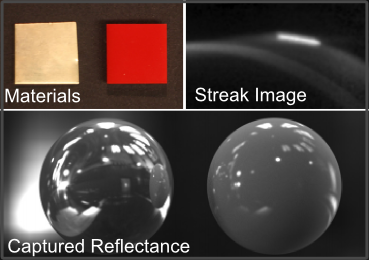
BRDF Capture With Ultrafast TOF Imaging
Paper Video
We proposed the first method to rapidly capture the BRDF of multiple materials simultaneously
using Ultrafast TOF imaging. Our method can capture BRDFs over long distances
from a single viewpoint without encircling equipment. BRDF capture is useful for photorealistic rendering, image relighting, and material identification.
Single View Reflectance Capture using Multiplexed Scattering and Time-of-flight Imaging
Naik, Zhao, Velten, Raskar, and Bala
ACM SIGGRAPH ASIA 2011
Depth Sensing using Microprism Arrays
This was my internship project at Samsung Research America with Pranav Mistry's Think Tank Team. I proposed a novel, passive depth sensing architecture using microprism arrays
and validated its performance using optical simulations and optics bench experiments. I also developed template matching algorithms to improve raw depth estimates and implemented gesture recognition algorithms. US patent pending.
Applications of Ultrafast TOF Imaging
Pose Estimation using Time-resolved Inversion of Diffuse Light
Raviv, Barsi, Naik, Feigin, and Raskar
Optics Express 2014
Frequency Analysis of Transient Light Transport with Applications in Bare Sensor Imaging
Wu, Wetzstein, Barsi, Willwacher, O'Toole, Naik, Dai, Kutulakos, and Raskar
European Conference on Computer Vision 2012