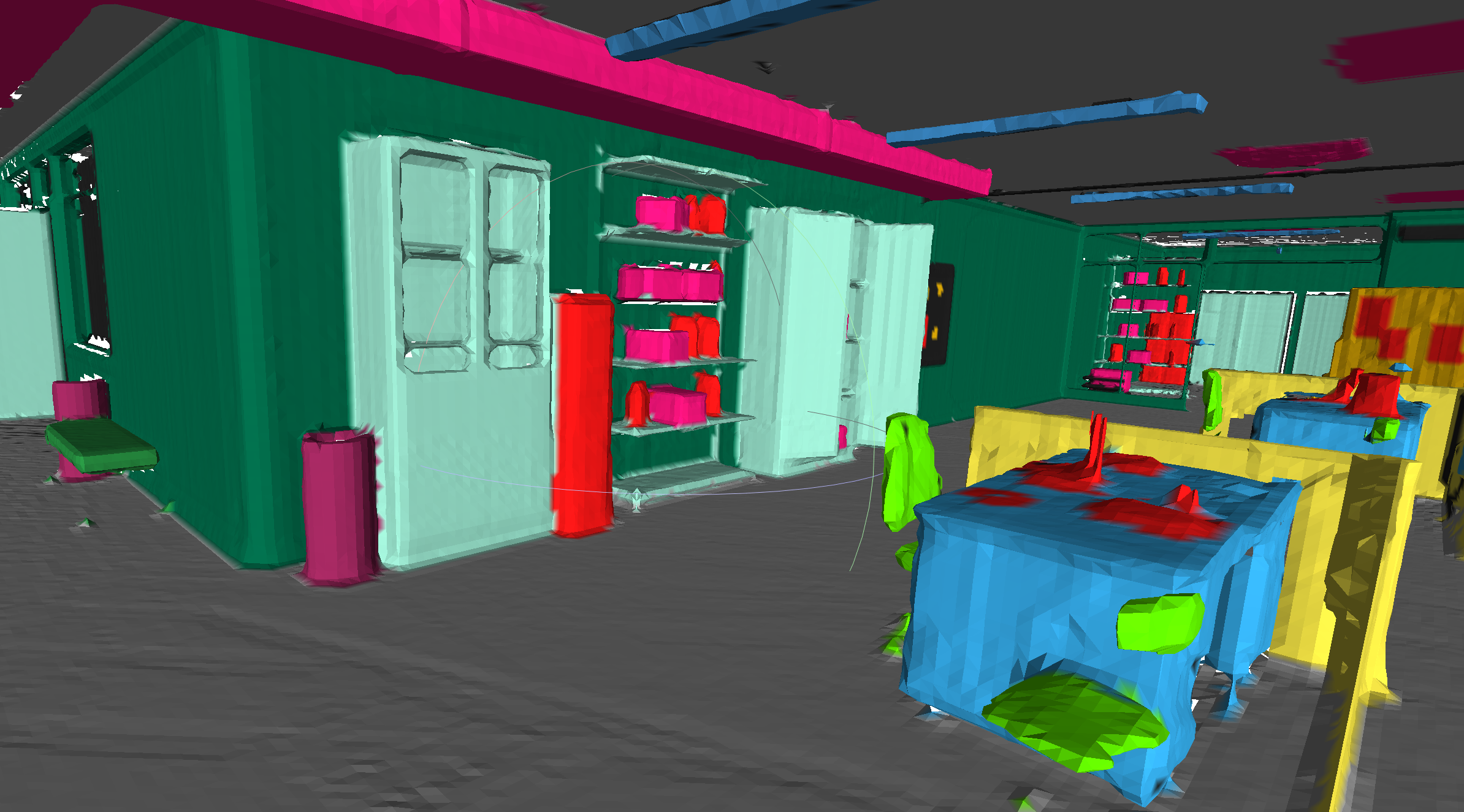
We use a photo-realistic Unity-based simulator to test our spatial perception engine in a 65mx65m simulated office environment. The simulator also provides the 2D panoptic semantic segmentation for Kimera. Humans are simulated using standard graphics assets, and in particular the realistic 3D models provided by the SMPL project. A ROS service enables us to spawn objects and agents into the scene on-demand. The simulator provides ground-truth poses of humans and objects, which we use for benchmarking (Rosinol et al., 2020). Using this setup, we create several large visual-inertial datasets.
We release two dataset versions:
- V1.0: is the dataset we used in our RSS2020 paper, and it is the one described below.
- V2.0: is an extended version that can be found here: uHumans2
Dataset V1.0
This is the original dataset used for evaluation in our RSS2020 paper.
The datasets are:
where each one has 12, 24, and 60 humans, respectively.
Specifications
- Stereo cameras
- Depth camera
- 2D Semantic Segmentation
- IMU
- Odometry
types: nav_msgs/Odometry [cd5e73d190d741a2f92e81eda573aca7]
sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
tf2_msgs/TFMessage [94810edda583a504dfda3829e70d7eec]
topics: /tesse/depth/camera_info 1073 msgs : sensor_msgs/CameraInfo
/tesse/depth/image_raw 1073 msgs : sensor_msgs/Image
/tesse/imu 40241 msgs : sensor_msgs/Imu
/tesse/left_cam/camera_info 1073 msgs : sensor_msgs/CameraInfo
/tesse/left_cam/image_raw 1073 msgs : sensor_msgs/Image
/tesse/odom 40240 msgs : nav_msgs/Odometry
/tesse/right_cam/camera_info 1067 msgs : sensor_msgs/CameraInfo
/tesse/right_cam/image_raw 1067 msgs : sensor_msgs/Image
/tesse/segmentation/camera_info 1067 msgs : sensor_msgs/CameraInfo
/tesse/segmentation/image_raw 1067 msgs : sensor_msgs/Image
/tf 105753 msgs : tf2_msgs/TFMessage
/tf_static 1 msg : tf2_msgs/TFMessage