In-line motion in flapping foils for improved force control
Most fast-swimming fish undulate their caudal fin in a symmetric fashion, with equal force generation from both the upstroke and downstroke of the fin. In contrast, other animals such as turtles and birds, flap their fins and wings in an asymmetrical fashion. This asymmetry typically involves a powerful downstroke generating large fluid forces and a ‘feathering’ upstroke with little force. Additionally, the flapping motion of the fin or wing is not purely transverse to the direction of motion of the animal, but also involves a strong oscillatory component parallel to its motion, called in-line motion.
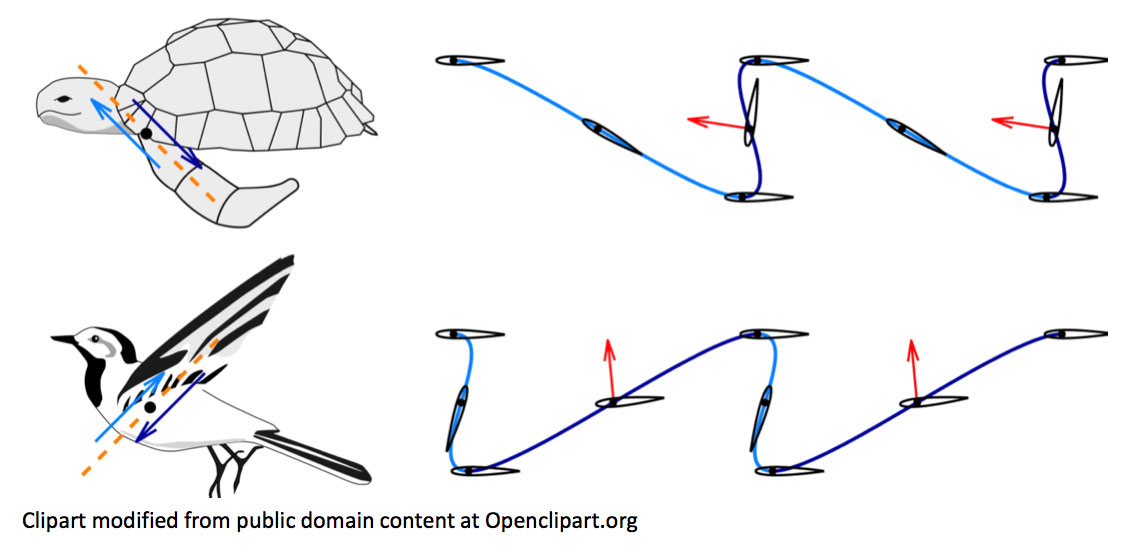
Figure 1. In-line Motion Examples: In-line motion is defined as a flapping trajectory where the foil is moved upstream or downstream in addition to across the flow [1].
In-line motion trajectories can be chosen to either create large thrust without an oscillating lifting force, analogous to the flapping performance of sea turtles, or create large lifting forces analogous to birds flying at slow speeds. Changing the degree of in-line motion could greatly expand the performance of flapping wings.
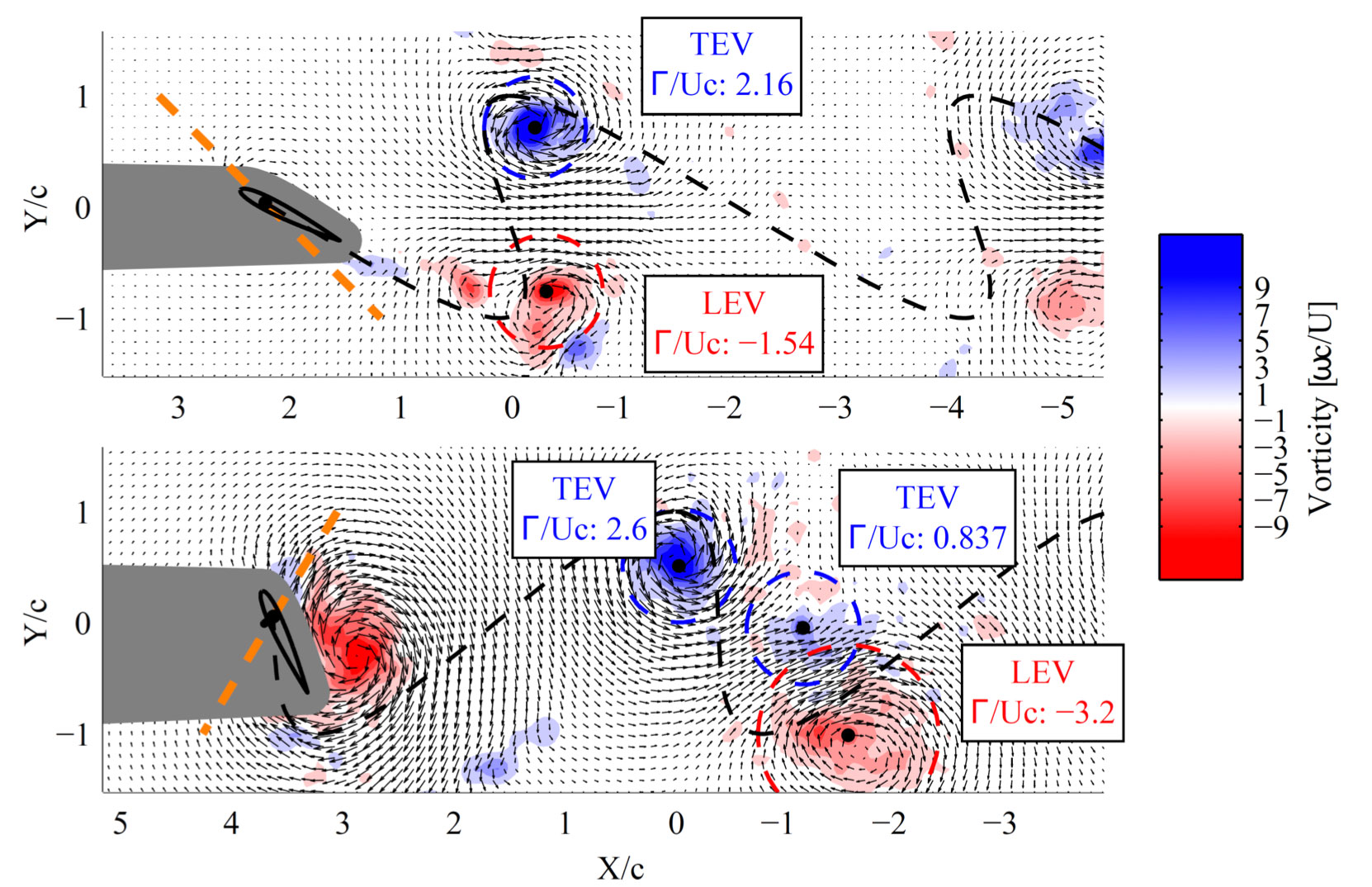
Figure 2. PIV Wake Measurements on Optimized Flapping Motions: Thrust is created through the production of a pulsed-jet wakes, consistent with the lack of transverse force (Top). Alternatively, the lift coefficient can be boosted to as high as CL=4, at the cost of expended power by the flapping actuator (Bottom). Experiments performed on a long-aspect ratio wing with simultaneous force measurements [1].
[1] J.S. Izraelevitz and M.S. Triantafyllou, Adding in-line motion and model-based optimization offers exceptional force control authority in flapping foils, Journal of Fluid Mechanics 742, 2014, p 5-34.