Research Videos
Dead Fish Swimming
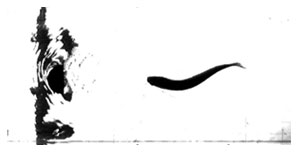
A dead fish displays its ability to swim upstream, in the Karman wake of a D-shaped obstacle. (video from Lauder, Harvard)
Blind Cavefish
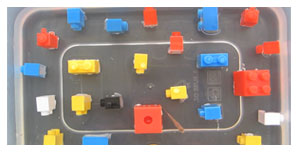
A Mexican Blind Cavefish (Astyanax mexicanus) navigates through a lego obstacle field. It displays its ability to avoid the obstacles, despite lack of sight.
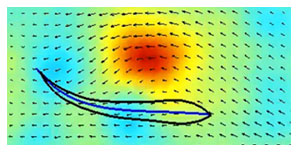
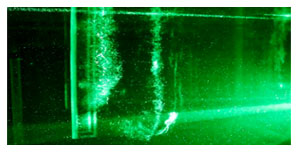
Vorticity Shedding
 Results from a particle image velocimetry (PIV) experiments shows the aftermath of a "vanishing foil" - a foil quickly retracted from the water.
Results from a particle image velocimetry (PIV) experiments shows the aftermath of a "vanishing foil" - a foil quickly retracted from the water.
Fish in Vortices
Results from PIV show the vortices in the Karman wake of an object, and a fish swimming between, and exploiting the energy of the wake.
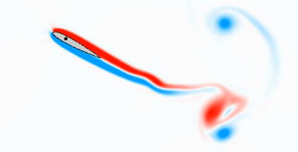
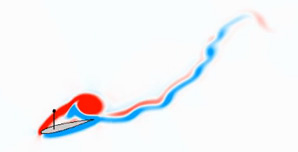
Angled Foil Visualization
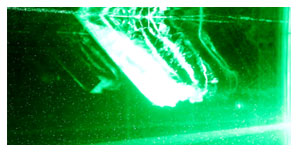
Visualization of the leading edge vortex on a foil with strong spanwise flow.
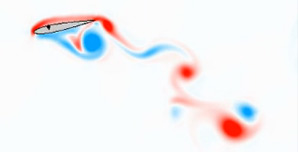
Straight Foil Visualization
 Visualization of the leading edge vortex on a foil with no spanwise flow.
Visualization of the leading edge vortex on a foil with no spanwise flow.
Classic Symmetric Motion
Used to generate thrust with an oscillating lift force (Lilypad simulation).
Asymmetric High Thrust
Used to generate thrust without any lift force. This motion profile is similar to how turtles flap their flippers when trying to maintain a constant depth in the water. (Lilypad simulation)
Asymmetric High Lift
 Used to generate large amounts of lift at the expense of thrust. Birds will flap their wings forwards and down while taking off, allowing them to get off the ground without first running to gain speed. (lilypad simulation)
Used to generate large amounts of lift at the expense of thrust. Birds will flap their wings forwards and down while taking off, allowing them to get off the ground without first running to gain speed. (lilypad simulation)
Object Recognition
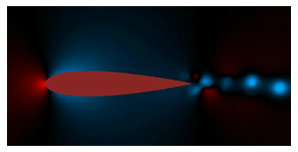
This Lilypad simulation shows the pressure field over the surface of and in the plane of a foil passing a cylindrical object.
Object Recognition
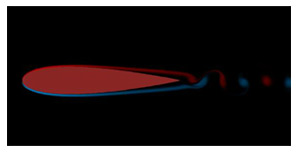
This Lilypad simulation shows the vorticity field over the surface of and in the plane of a foil passing a cylindrical object.
BOP Tilting

3D BDIM simulation illustrating the lambda 2 vortices created as a model of a blow-out preventer (BOP) is tilted back and forth sinusoidally.
BOP Oscillating
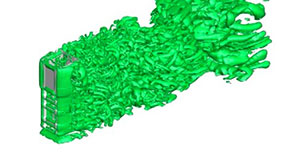
3D BDIM simulation illustrating the lambda 2 vortices created as a model of a blow-out preventer (BOP) oscillates in the cross-flow direction sinusoidally.
Piezoelectric Sensor
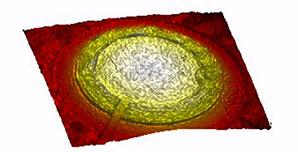
Digital holographic microscopy (DHM) analysis of the Micro diaphragm Piezoelectric sensor’s deformation in response to a 1 Hz. sinusoidal signal.
Piezoelectric Sensor
Digital holographic microscopy (DHM) analysis of the Micro diaphragm Piezoelectric sensor’s deformation in response to a 2 Hz. sinusoidal signal.
Octobot
High speed video of the Octobot releasing mass as it travels across a tank of water demonstrates the remarkable acceleration from the shape change.
Posters


MEMS Pressure Sensors

Poster summarizing research related to the development of MEMS pressure sensors.
NEEC Poster 2012
Poster Presented on flow separation control using rotating cylinders, NEEC conference 2012.
It's Dark and Lonely...

Poster summarizing research related to the flow control and hydrodynamic sensing.
Seal Whiskers

Poster summarizing research related to the study and mimicry of seal whiskers for flow sensing.