Multi-Element Foils
Introduction:
Multi-element foils offer enhanced performance for numerous large angle of attack and high lift applications. For this performance gain to be realized, however, multiple foil parameters including the gap width between elements, the orientation of each successive element, and the span-wise twist must be properly tuned for the given flow conditions. The goal of the proposed research is to apply the knowledge and experience gained from sensing leading edge vortex shedding on symmetric hydrofoils, to the case of multi-element foils, with the aim of monitoring flow separation and reattachment in real time.
Background:
For applications requiring high lift forces at large angles of attack and low flow velocities, multi-element, slotted foils are often a well-suited solution. Multi-element foils increase lift force by allowing for increased camber during high angle of attack operation, and delaying flow separation near the trailing edge. This delay in flow separation on a deflected flap element is achieved by introducing a slot ahead of the flap nose for boundary layer control [1].
Multi-element slotted wings find applications across a wide range of engineering disciplines. Most modern aircraft use multiple flaps and slots to both increase surface area and camber during the critical takeoff and landing portions of flight, as seen in figure 1a. In the automotive industry, Formula One race cares use multi-element foils to increase the down force produced by the rear wing, as seen in figure 1b.
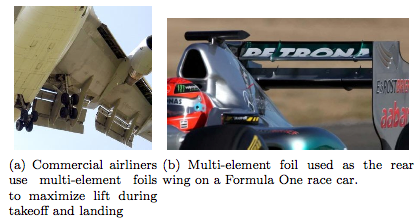
Figure 1: Multi-element wings are optimal for cases where high lift forces are needed, or for operation at large angles of attack.
Wingsails:
Wingsails sit at the forefront of sailing technology, providing not only performance superior to traditional soft sails, but also representing a unique and sustainable propulsion alternative for autonomous surface vehicles [2]. Because wingsails reduce the uncertainty in flying shape found in the cloth sail fluid-structures interaction problem, they are well suited for autonomous control, as seen in figure 2b.
Although the flying shape of a wingsail is defined by the rigid wing structure, the near-body flow field is very complicated. The flow on a yacht sail is heavily dependent on wind angle of attack, with downwind sailing configurations typified by large separated regions that are challenging to model accurately using traditional numerical techniques. Separated regions of flow are also present in the upwind configuration, both at the leading and trailing edges of the wing elements, as well as behind flow obstructions such as the mast, shrouds, and crew members.
If the dynamic nature of a sailing yacht is taken into account, the problem is further complicated. When sailing, yachts encounter variable wind speed, as well as diverse sea conditions. Each of these factors impacts the flow on the sails by changing the flow velocity in the case of a gust, the magnitude and direction in the case of a yacht pitching and heaving in waves, and the projected area and shape of the sail itself in the case of a changing heel angle.
The highly dynamic nature of the near-body flow on a wingsail represents an ideal case for the use of on-body pressure sensors for real-time measurement of the flow field. The use of pressure sensor feedback on a multi-element wingsail will allow for the detection of separated flow, enabling the sail to be optimized for environmental conditions. The ability to accurately trim the wing based on real-time pressure measurements offers to both enhance performance and enable autonomous wing control, independent of additional environmental sensors.
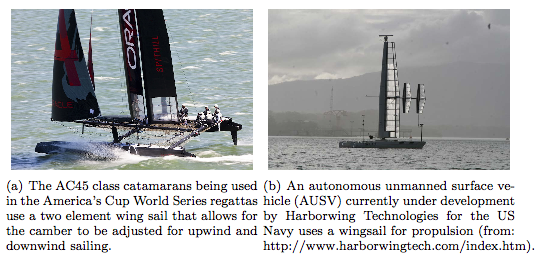
Figure 2: Wingsails composed of multi-element foils have advantages for both performance applications and autonomous vehicle propulsion. The high lift to drag ratio of multi-element foils is ideally suited for efficient performance across a wide wind range.
Numerical Simulations:
Prior to carrying out physical experiments, the multi-element foil case was simulated using the Lilypad boundary immersion method code (http://code.google.com/p/lily-pad/) being developed by several students under the direction of Dr. Gabriel Weymouth. Simulations were performed for both the two and three element cases, and provided valuable insight into the anticipated forces and surface pressure distributions.
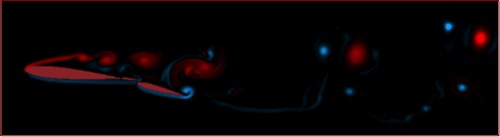
Figure 3: The LilyPad boundary immersion method software was used to simulate the three-element foil case.
References:
[1] J Dusek and M Triantafyllou. Leading edge vortex detection using bio-inspired on-body pressure sensing. Masters Thesis, pages 1–116, Jan 2011.
[2] G Elkaim.System Identification for Precision Control of a Wingsailed GPS-Guided Catamaran. PhD thesis, Stanford University, 2001