Obstacle detection and identification
When an underwater vehicle moves, it displaces water, generating a unique velocity and pressure field around it. The presence of an obstacle in the vicinity of a cruising vehicle forces the fluid to move around it, which results in a modified velocity and pressure field. A vehicle equipped with surface mounted pressure sensor arrays can measure the pressure signature of the object and infer the shape of the obstacle that is responsible for it.
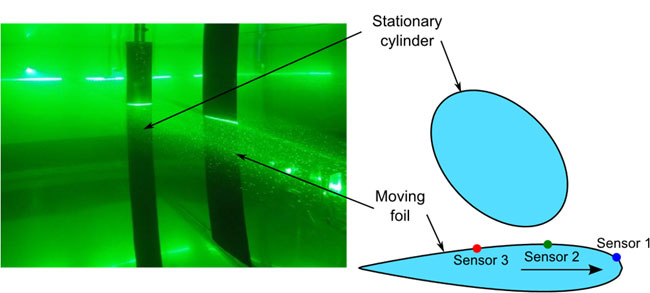
A model based on potential flow theory provides a good approximation of the pressure signature until the viscous effects become dominant. Experimental pressure traces (solid lines) from the set-up shown above are compared to the model (dashed lines) in Figure A below.
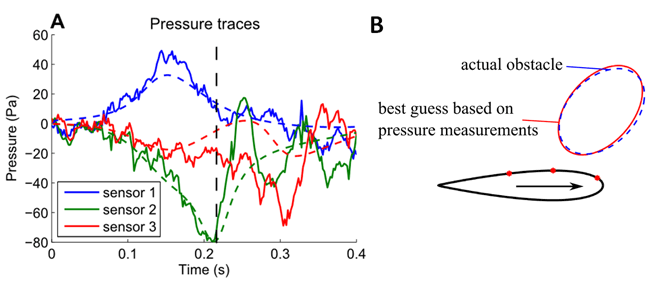
The potential flow approximation has been used in a non linear Kalman filter to identify cylinders (Figure B). The pathline highlighted in green below shows one of the manifestations of the viscous effects.
