Ultra-fast escape of shape-changing underwater robots inspired by Cephalopods
Biomimetics as a functional study of biological systems has inspired the creation of unconventional robots that outperform the traditional ones. Nature has inspired us to rethink the fundamental concepts behind designing robots, especially underwater vehicles. Soft robots that exploit structural changes have reduced degrees of complexity and perform better than the conventional robots with hinges and joints. Cephalopods such as the octopus, when threatened, escape fast by inflating its mantle cavity and rapidly expelling the fluid in the form of a propelling jet, assuming a streamlined shape (Fig. 1). This jet propulsion technique involving rapid shape-change allows the octopus to overcome flow-separation effects and recover energy from the fluid, propelling it forward tens of body lengths in a few seconds. Traditional underwater vehicles, with the exception of torpedoes that expend enormous amounts of fuel, are unable to match this performance. We develop and conduct experimental studies on an octopus-like flexible-hull robot to understand the mechanism behind a deformable shrinking underwater vehicle that allows it to vastly outperform a rigid self- propelled vehicle. The propulsion mechanism can prove to be useful in extending the range and performance of underwater vehicles and applications like threat evasion.
Design:
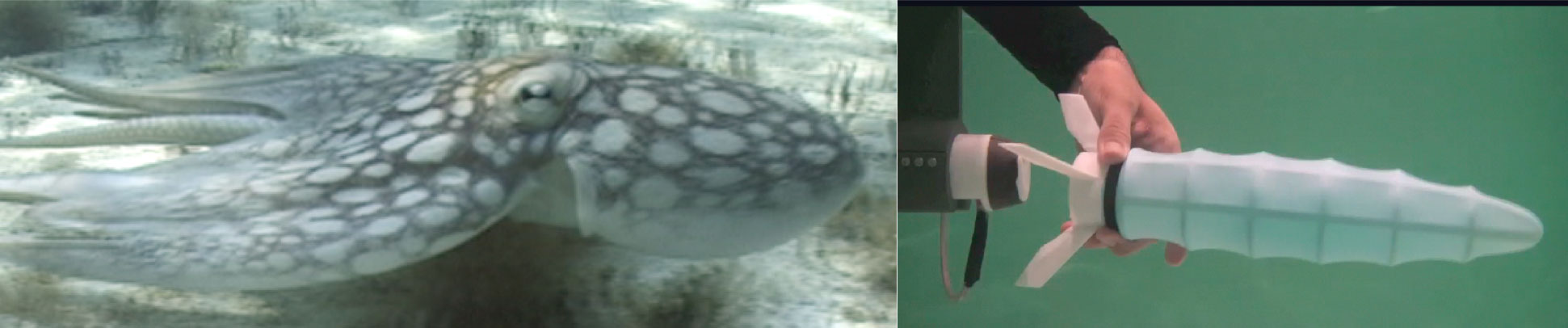
Figure 1. (A) Octopus using jet propulsion to escape from threat at high speed [2]. (B) This propulsion mode inspired the design of a simple jetting robot that demonstrates the mechanics of thrust and flow control induced by shape-change. An elastic membrane made of commercially available synthetic rubber is stretched around a rigid hull in the shape of a 5:1 prolate spheroid (Fig. 2). Length of the rocket from tip of the nose to the jet exit where the membrane is secured is L = 27cm. The rigid structure is a polycarbonate model that is 3D-printed in a single piece, and has a main body with large openings leading to a convex jet nozzle, and fins for stabilization during the maneuver. A non-dimensional parameter called the shape-change number t*, which is primarily a function of the ratio of the orifice area to the original projected area, is considered for the design and is directly proportional to the overall efficiency of the system [3, 4]. To produce the largest possible shape-change number t* for a given membrane stiffness, the nozzle opening is as large as possible, reducing friction losses and increasing the exit mass flow rate.
Experiments:
Open water tests are done in a 5m x 6m x 1.2m tank in the CENSAM marine laboratory (Fig. 2A), where the robot is first inflated by filling it with pressurized water from a rigid mount (Fig. 2B), and then the funnel is opened and the rocket is released to accelerate forward. The performance is measured using high-speed cameras at 150 frames/second (Fig. 2C).
Video capture analysis is used to determine the instantaneous volume of the rocket and the position of its center of mass, while time derivatives provide the velocity, acceleration and flow rate (Fig. 3). Results for self-propelled runs show the rapid acceleration and deflation of the shrinking rocket (Fig. 4).
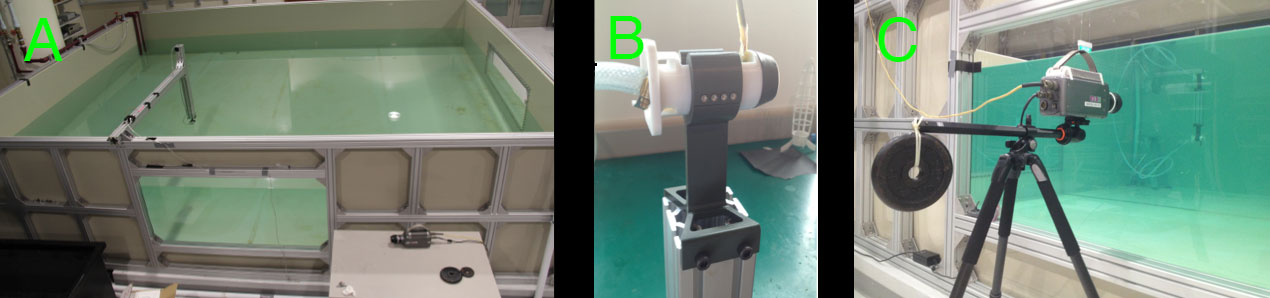
Figure 2. Open water test setup for the Octobot.

Figure 3. (A-D) Image processing consists of thresholding, performing edge detection and morphological operations on each frame to isolate the rocket outline. The result is calibrated based on the known length of the rocket (270mm) and volume of revolution, centroid and time derivatives are computed.
Performance:
Averaging over four tests, the robot achieves peak speeds of 10 body lengths per second or 2.7 m/s, an acceleration of 14L/s2 or 3.8 m/s2, 53% of the jet power is converted into kinetic energy, and the peak thrust force is 30% greater than the thrust provided by the jet. The results for the deflating robot compare favorably to the reports of fast-starting fish efficiency [5] is estimated as 16-39%, and the reported speed and acceleration of cephalopods. In [6] it is shown that squid (Loligo Opalescens), ranging from 95 to 125 mm in mantle length, when stimulated by a visual flash, employ escape jetting to travel 4 mantle lengths within 700 ms with a top velocity of 10 mantle lengths per s, reached at about 400 ms.
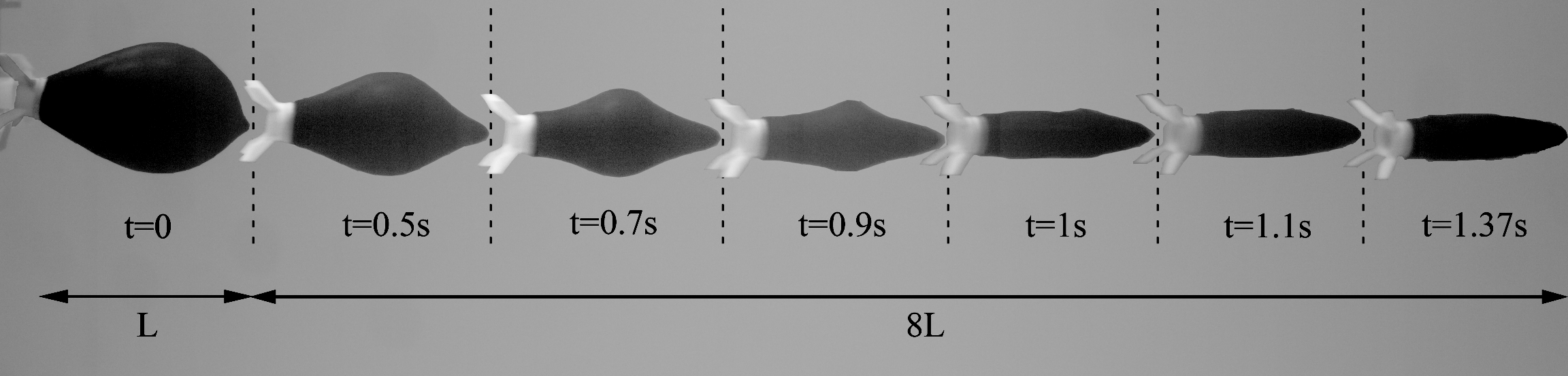
Figure 4. Composite of seven images from underwater video, showing the position and size of the rocket versus time. L denotes the length of the robot covered by the membrane.
References:
1. http://www.asnailsodyssey.com/2. Image capture from video courtesy of Dr. Roger Hanlon of the Marine Biology Laboratory, Woods Hole.
3. G. D. Weymouth, M. S. Triantafyllou, Ultra-fast escape of a deformable jet-propelled body. J. Fluid Mech. 721 367-385 (2013).
4. G. D. Weymouth, M. S. Triantafyllou, Global vorticity shedding for a shrinking cylinder. J. Fluid Mech. 702, 470-487 (2012).
5. H.R. Frith and R.W. Blake. 1995. The mechanical power output and hydrodynamic efficiency of northern pike (Esox Lucius) fast-starts. J. Exp. Biol., 198, 1863-73.
6. H. Neumeister, B. Ripley, T. Preuss, and W.F. Gilly. 2000. Effects of temperature on escape jetting in the squid Loligo opalescens. J. Expl. Biol., 203, 547-557.