Bioinspired Seal-Whisker-Like Sensors
Harbor seal whiskers possess a unique geometry along the length of the whisker which is believed to suppress vortex induced vibrations (VIV) in frontal flows. In this project, we design, fabricate and experimentally characterize self-powered artificial micro-whisker sensor. Micro-whiskers that feature undulations similar to those present on the real harbor seal whiskers are developed. The structure of the MEMS whisker sensor developed in this work consists of two major parts – the artificial micro-whisker fabricated by stereolithography (SLA) and the piezoelectric Pb(Zr0.52Ti0.48)O3 (PZT) MEMS sensing base fabricated by conventional microfabrication technologies. The underwater oscillatory flow sensing ability of the sensor is experimentally evaluated employing a dipole stimulus. Experimental results demonstrate that the whisker sensor is able to detect minute disturbances underwater with a velocity detection limit as low as 193μm/s.

Figure 1. Left: A schematic of the device structure of the artificial harbor seal whisker sensor developed in this work. Right: Optical image of the stereolithographically fabricated micro-whisker that is mounted at the center of the PZT membrane employing a precision XYZ control stage.
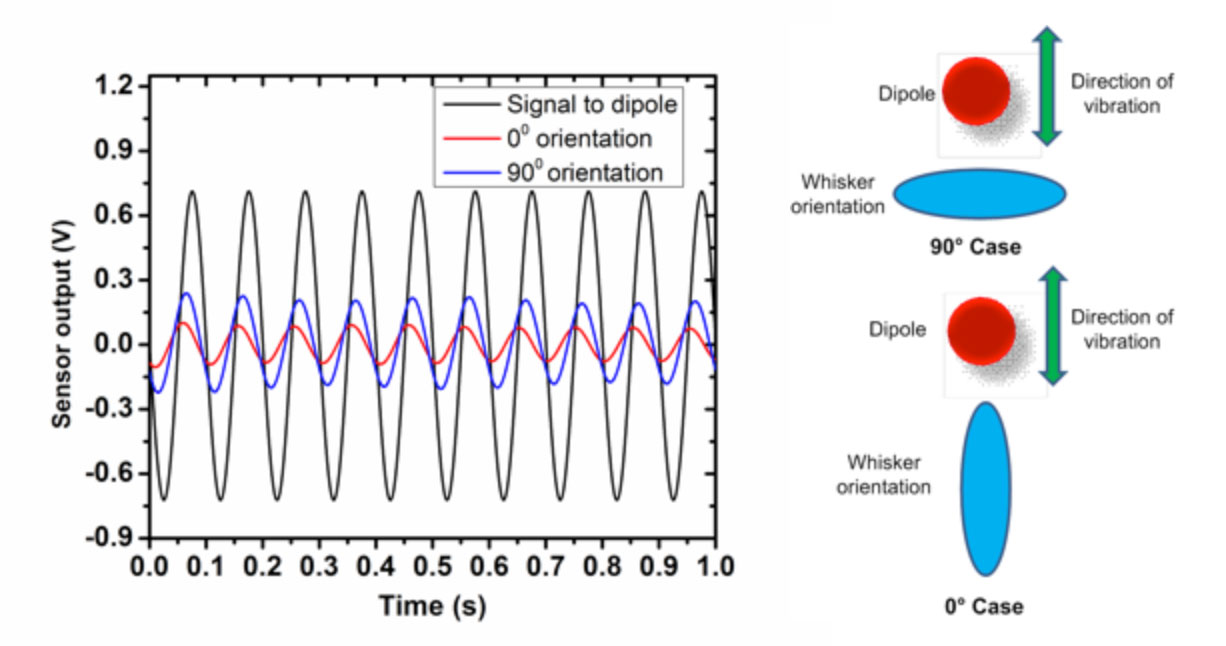
Figure 2. Left: Underwater response of the whisker sensor at 00 and 900 orientations to the dipole stimulus vibrating at 10 Hz. Right: a schematic showing the top-view of the orientation of the whisker with respect to dipole.