Active Yaw Control of Underwater Vehicles
with Bio-Inspired Pressure Sensor Feedback
Over millions of years, fish have evolved in unique ways to adapt to the idiosyncracies of their environments. The blind Mexican cavefish lives in the deep and beautiful underwater caverns by the Yucatan Peninsula, and they are so named because they have no eyes. Given the mazelike stalagmite and stalactite formations in the caves, this gives rise to the question of – how does a fish survive here without the ability to see? As it turns out, the blind cavefish swims adeptly by solely relying on a unique sensory organ known as the lateral line to generate hydrodynamic images of its surroundings. The lateral line is a highly sensitive array of flow sensors that is comprised of two different types of neuromasts: superficial ones which are located on the surface of the body and primarily detect velocity, and canal neuromasts, which are located inside canals under the skin and detect water acceleration. This sensor gives the blind fish the ability to navigate and forage for food, and if we could develop a technology like this for AUV’s, it could guide them to maneuver through the dark, unsteady and cluttered environments where sonar and vision-based systems fail. As such, we aim to take inspiration from the blind cavefish in order to develop an artificial lateral line for use on underwater vehicles, and relevant control algorithms based on hydrodynamic theory.

Figure 1a: Underwater cave in the Yucatan Peninsula (sportdiver.net)
Figure 1b: Photo of blind cavefish next to seeing Mexican tetra (news.discovery.com)
In this project, we have constructed an underwater vehicle (Figure 2) which demonstrates one application of an artificial lateral line, the active detection and correction of a vehicle’s angle of attack. The vehicle is equipped with five cranial pressure sensors, and a series of experiments were conducted to confirm that the vehicle’s angle of attack could be easily estimated from pressures measured at static angles. Through these experiments, we show that the concept of angle of attack detection is viable, and moreover that the feedback is fast and easy to interpret in comparison with traditional sonar or vision based sensing.

Figure 2: CAD model of test vehicle (left) and experimental setup (right).
Furthermore, we show that a simple proportional controller is sufficient to keep the vehicle aligned with the direction of flow within a range of gains (Figure 3). During sharp maneuvers, the vehicle exhibits a response that looks much like those seen in non-minimum phase systems, which causes a small time delay and instability at higher gains. To address this, it was postulated that a model-based control system could be used to improve the response of the vehicle.
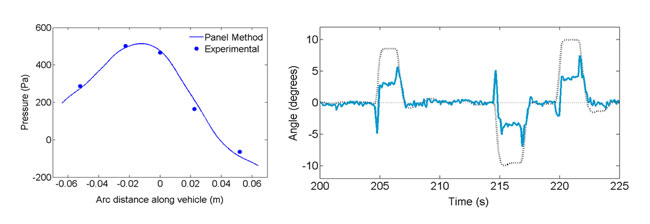
Figure 3: Left: A potential flow model closely estimates the pressure at an angle of 10 degrees. Right: Closed-loop control maintains an angle of zero degrees when activated.
To develop the control system, a model was first constructed using the panel method, which is capable of calculating the flow around complex 3D configurations with relative ease and speed. The speed of the calculation is a result of assuming viscous effects are small. This is a powerful assumption, and is consistent because we focus on sensors on the front of the vehicle, where the pressure gradient is very favorable and the flow is fully attached. Simulations were developed to model the pressure field around the vehicle for two cases: while at static angles of attack, and while executing dynamic maneuvers. Results show strong agreement with experimental data for both cases, indicating that the flow in the region of interest is very ideal and therefore easy to predict. Given this, we then demonstrate the application of this basic and well-studied method of simulation as a means of enhancing a control system by adding information about the model. The enhanced control system should be able to mitigate the non-minimum-phase-like effect, reducing time delays and improving stability.
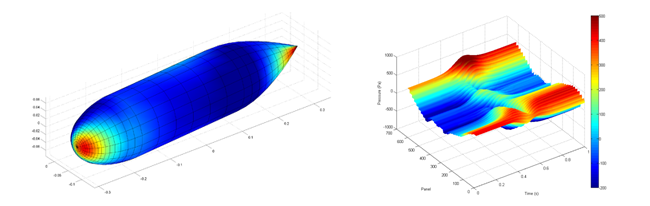
Figure 4: Left: Pressure simulation over the surface of the vehicle during an accelerating turn. Right: Pressure signature of a specific turn (plotted over time).
Moving forward, we plan to use the panel method simulation to develop a Kalman Filter which can estimate the yaw angle of the vehicle, as well as the rate at which the flow is changing. Such a system will ultimately give the vehicle the ability to travel with the current to get to a destination faster while expending less energy. This project has highlighted the advantages of an artificial lateral line system – namely, that an array of pressure sensors is small, lightweight, low-cost, and requires far lower bandwidth than traditional sensors. A vehicle equipped with an artificial lateral line would have the potential to perform highly reflexive maneuvers in close quarters, and sense dangers or obstacles in the dark and murky environments that other sensors perform poorly in. The development of the artificial lateral line and relevant control algorithms could greatly enhance our ability to detect, navigate and survive in the underwater environment.