This coming semester, we'll be working on the following project
We will be competing in the 2016 IARC. It involves heavy integration of all three subsections of MIT UAV -- Design, Navigation/Perception, and Flight. We plan on pushing the boundaries of UAV developmnent and blogging about our challenges and progress along the way.
Quads In Disaster Relief: We worked with the SIGUS MIT research group to perform an analysis on the utility of quadrotors in post and pre-disaster scenerios. We presented our findings at Harvard and at the UN World Urban Forum in Medellin, Colombia.
Tech Fair Quadcopters: Over MIT's Independant Activities Period (IAP) we designed five different quadcopters that displayed company logos as part of a collaboartion with Techfair. Each quadcopter was unique, and they were flown during the TechFair event.

Tour Guide Quads: We worked with the SENSEable City Lab to create a quadrotor and iPhone app capable of giving outdoor tours. Watch the video of SkyCall below.
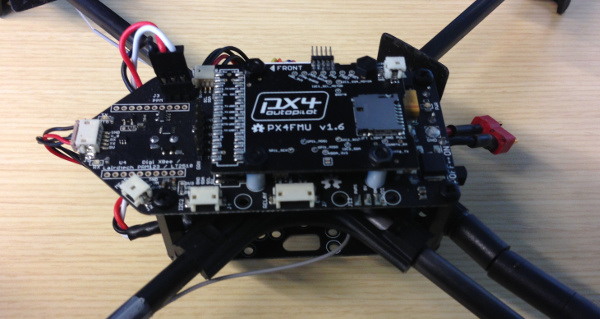
PX4 Firmware and QGroundControl: We worked within the PX4 FMU and QGroundControl projects, which are tools for low-cost, high-end autopilot firmware aimed towards hobbyists and researchers.
Custom Frame+Attachments: We machined custom frames for our quadrotors. We designed multicopter frames for various sized UAVs and attachable parts, such as grippers, landing gea and housings for electronics.

UDB3 Flight Controller: Using a modified UDB3 board and code at the Aerospace Controls Lab, we worked on firmware for a dsPIC30 which allowed for remote controlled flight.

Joystick control: We wrote a Python program using PyGame to allow control of quadrotors via a video game controller.
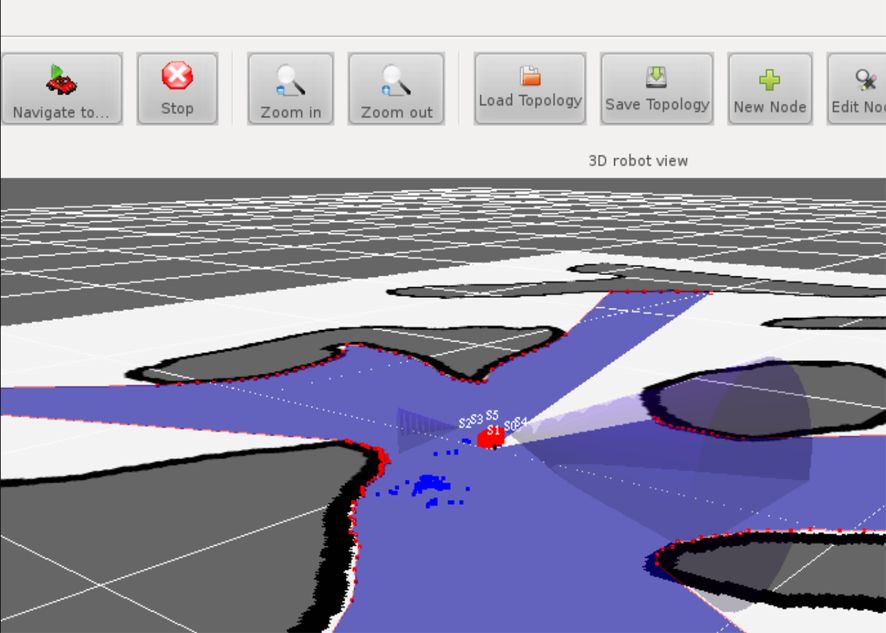
ROS/MRPT Simulations: We set up 2D and 3D simulation environments and quadrotor models to test navigation/perception software.
Plotting tool: We wrote C# and Python programs for realtime plotting of sensor data.
Blade guards: To prevent our quadrotors from chopping up passersby during flight tests on Kresge Lawn, we designed and machined foam blade guards.

The scope and goals of our current projects are dynamic and will change to suit the interest of the club members. So if you have a cool idea you want work on, let us know and we'll see if we can add it in! And if you're not sure what you'd like to work on - there's always something to do!
|
|
|
|
|
|
|
|
|
|







