<< previous
return to project
next >>
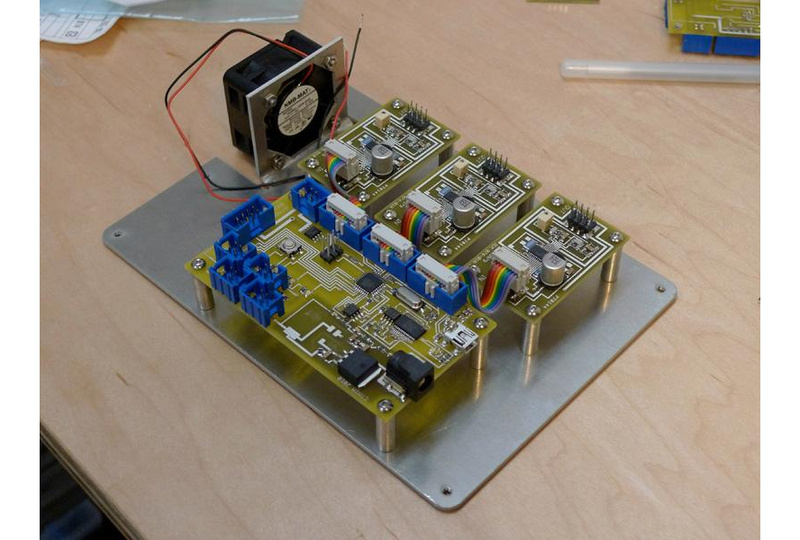
Motion control would have been done using custom firmware and driver boards.
<< previous
return to project
next >>