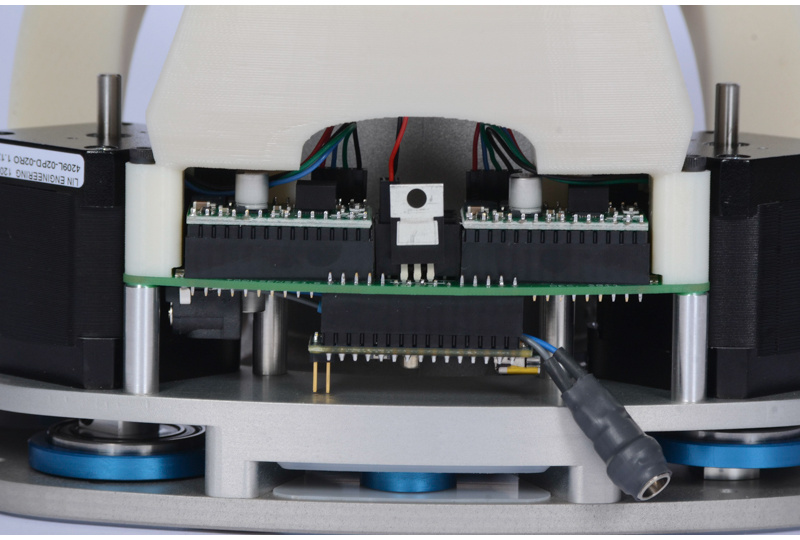
A custom PCB cleanly connected several off-the-shelf modules such as stepper drivers and an Arduino Nano. Our original low-level motion control firmware was written in AVR assembly, simply due to my ignorance of C at the time.
A custom PCB cleanly connected several off-the-shelf modules such as stepper drivers and an Arduino Nano. Our original low-level motion control firmware was written in AVR assembly, simply due to my ignorance of C at the time.