|

|
| The concept behind our compact linkage-based XY positioning stage, which provides zero-backlash motion across a 14mm diameter corrective range. |
A proof-of-concept of the positioning system. It established that we could indeed reach every point inside the range circle, and gave us confidence to build the full prototype. |

|

|
| We quickly built a fully functioning positioning stage from acrylic so that Alec could make progress on the software while I worked on the hardware. |
The first thing ever drawn with our 2-axis position-correcting system was the letter "G". |

|

|
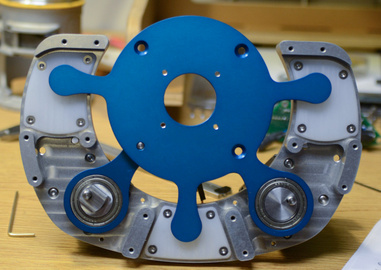
| The positioning linkage, made from anodized aluminum. Lollipop-shaped protrusions are used to constrain the large plate. Note that the bearings are missing the eccentric plugs that couple to the drive motors. |
Machining a primary housing component from cast aluminum plate. |

|
|
| These HDPE inserts constrain the lollipop features on the linkage plate to resist out-of-plane loads from the spindle. |
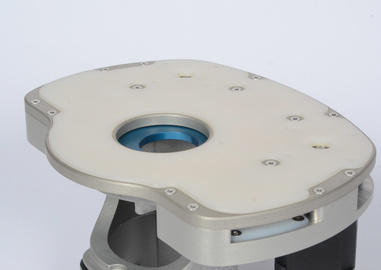
The fully assembled positioning linkage. |
|

|
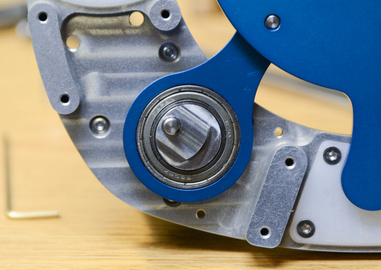
| Each motor drives an eccentric plug, which causes the bearings to shift and the mechanism to move in a controlled manner. |
The assembled base. |

|

|
| A quick clay handle study. In the end, we went with simple ball-shaped handles for this prototype. |
The fully assembled position-correcting router prototype. |
|

|
| An HDPE "skid pad" smoothly rides on the workpiece with the right amount of friction. |
Dust has been a nemesis from the beginning of the project, and we have handled it it a variety of ways over the course of our many prototypes. For this design, we adopted an open, dust-breathing approach. |
|

|
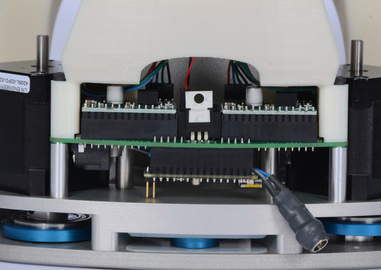
| A custom PCB cleanly connected several off-the-shelf modules such as stepper drivers and an Arduino Nano. Our original low-level motion control firmware was written in AVR assembly, simply due to my ignorance of C at the time. |
A global-shutter machine vision camera was used as input to Alec's locating algorithms. |

|

|
| Alec working on code while keeping me company in the machine shop |
Applying strips of fiducial markers that had been printed on 8.5"x11" paper using a standard desktop printer. Improving on this became the focus of an early project. |

|

|
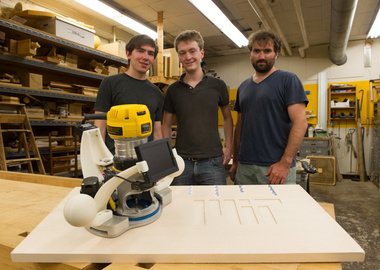
| The tool in use. |
One of our most popular demos was cutting an outline of the United States. It showed impressive detail while highlighting the benefits of being able to follow a digital design. |
|
|
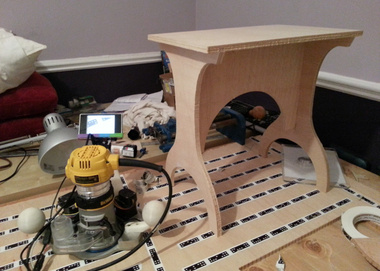
| We presented an academic paper on the position-correcting router at SIGGRAPH2012 (click image for link to paper). |
One of the first furniture items we built was this wooden stool. |

|
|
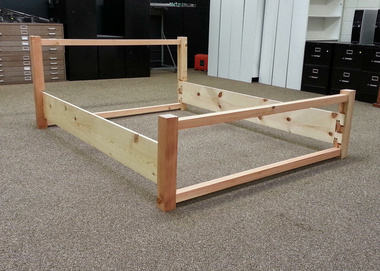
| An early project made by Alec as a gift for his friend. |
A bed frame built using Origin |
|

|
| Alec and I sitting on a bench we joined together using dados cut with Origin, in early 2014. |
We participated in the startup accelerator "Mass Challenge," inluding attending several pitch-day events. |

|
|
| Pitching one of our earliest investors in a lean-to shed in Palo Alto. Does it get more Silicon Valley? |
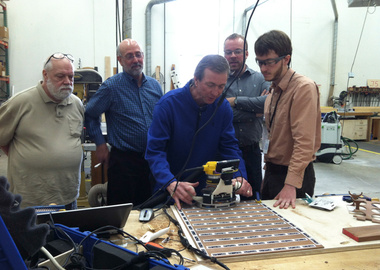
Another fun trip was visiting folks at Rockler's headquarters in Minnesota. They were unimpressed by cutouts of the United States, but very happy to see us cut a straight line (which they insisted on measuring to be sure). |

|
| We attended Maker Faire 2014 in San Mateo, followed by SolidCon. It was during this trip that we made the crucial connection to our soon-to-be CEO Joe Hebenstreit and lead electrical engineer Jeremy Blum, without whom Shaper would not be where it is today. |
