By now, you are all experts at setting up equations of state.
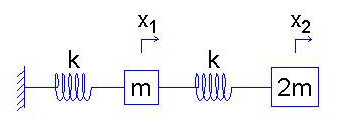
Below is a translational system in many ways analogous to the rotational one in Problem 4.1:
Here's a quick summary of one strategy to set-up equations:
Identify each mass. (e.g. M1 and M2 here...)
...And the position and velocity of each mass is a valid state variable. (x and dx/dt for M1 and M2)
Relate:
Accelerations of masses (m*a)
Damping proportional to velocity (B*v) [none in the undamped system shown...]
Spring forces proportional to displacements in spring members (k*x)
For the undamped, 2-mass system shown above:
Put it all into matrix format, as shown below:
The 4x4 matrix above is (of course) typically called the 'A' matrix (a la: dx/dt = A*x +B*u)