The control network group focuses on the development of fundamental theory and algorithms for the analysis and design of two different types of control networks: (a) ground transportation networks and (b) biomolecular networks in living cells.
Our Work in the News
New Device Could Make Large Biological Circuits Practical MIT News Office, November 2014
Lightening the load in synthetic biology Eric Klavins, Nature Biotechnology December 2014
Costruito il Primo Circuito Biologico di Precisione ANSA, November 2014
Older News
Bulding a Smarter 'Smart Car' Discovery News, June 2011
Are we ready for driverless cars? by C. Gillis, Maclean's Canadian news magazine, November 2011
Enlightening the Load by L. Bryan Ray, Science, October 2011
Living cells say: Can you hear me now? by D. L. Chandler MIT News Office, November 2011
'Smart cars' that are actually, well, smart by E. Finn MIT News Office, June 2011
Modularity Defined by H. Sauro, Nature/EMBO Molecular Systems Biology 2008
Transportation Networks
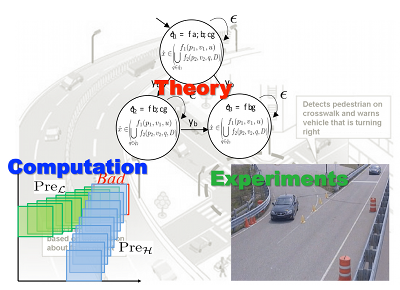
The decreasing costs of embedded computing and communication technologies are pushing several of today’s engineering systems toward increased levels of autonomy. Highly interconnected networks of physical devices and embedded computers, exhibiting continuous (due to the physics) and discrete (due to the computation) behavior, that is, Cyber-Physical Systems (CPS), are becoming a substantial part of our life. A remarkable example is that of transportation networks. While the potential for improvement is enormous, increased levels of autonomy also bring about critical problems. Challenges include ensuring a correct and safe functioning despite the large number of physical devices, the intrinsically hybrid continuous/discrete nature of the system, limited information, and the presence of human operators. How can one design these systems so they are provably correct despite these challenges? How does one formally verify their behavior? Del Vecchio’s group is addressing these questions by using and developing tools and algorithms based on control theory, dynamical systems, optimization, and computer science. A major focus is on developing algorithmic procedures that can run fast in real-time and have reduced computational demands so they can be effectively used in real applications. At the same time, Del Vecchio's group works with human-factor experts to create hybrid dynamical models of human drivers, which are employed in the design phase, and perform test-bed and field experiments through collaboration with automotive companies. �
Biomolecular Networks
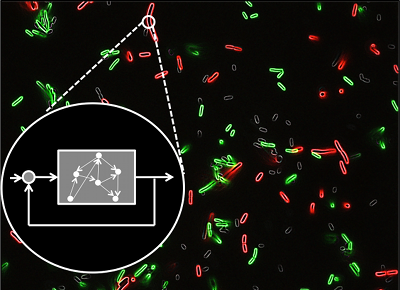
The current technology of synthetic biology allows to fabricate and insert into living cells arbitrarily complex circuits that can program and control cellular behavior in a prescribed way. The potential applications are many and range from bioremediation, to biosensing, to curing illnesses such as cancer and diabetes. One current challenge is the fact that as the complexity of circuits increases, the behavior of such circuits becomes unstable and poorly predictable. Our group investigates the system-level phenomena responsible for this problem along with suitable engineering solutions that make synthetic biomolecular circuits more robust. Among the system-level phenomena that we study, we have retroactivity (loading in biological circuits), limitations and sharing of resources required for circuits functioning, stochasticity, spatial effects, and other unknown interactions. Our approach to analyzing and solving these problems is theory-based and data driven. We use and extend tools from control and dynamical systems theory to formulate problems in a way such that they become amenable of rigorous mathematical solutions. We educate our solutions and theories through experiments performed in bacteria E. coli, yeast, and mammalian cells, depending on the specific question being addressed. While addressing concrete engineering questions, we often uncover more general design principles that nature already implements, leading to shed light into interesting systems biology questions. Applications that we specifically target while addressing the predictability and scalability of synthetic biological circuits include biosensing and classification tasks, as well as more complex circuitry for beta cells homeostasis in diabetes and for recognition and killing of cancer cells.